


 ロボット技術
ロボット技術2自由度振動系の運動方程式を算出する!制御工学の基本知識
2020-08-11 tajima Tajima Robotics
本記事は、2自由度振動系で学ぶ制御工学入門の第2回です。 本シリーズでは、2自由度振動系の制御を通して制御工学の基礎知識を …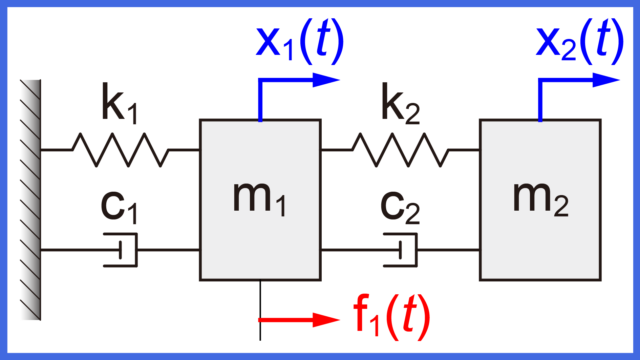 ロボット技術
ロボット技術システム制御の重要性は?2自由度振動系で学ぶ制御工学
2020-07-22 tajima Tajima Robotics
本記事は、2自由度振動系で学ぶ制御工学入門の第1回です。 本シリーズでは、2自由度振動系の制御を通して制御工学の基礎知識を学び …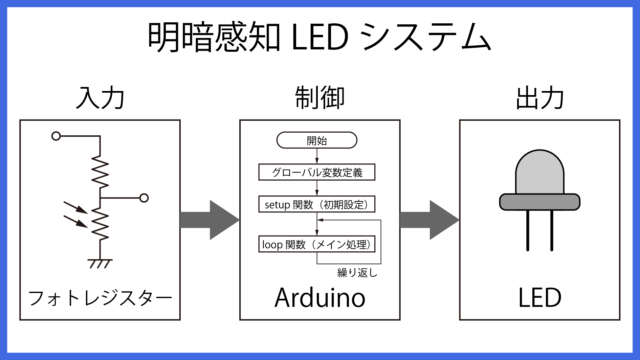 ロボット技術
ロボット技術Arduinoで明暗センサ付きライトを作ろう!光センサでLEDの明るさを制御する
2020-07-06 tajima Tajima Robotics
部屋が暗くなると自動で点灯するライトは便利だなって思いました。 そのような明暗センサ付きライトは値段が高く、すぐには手が出ないなぁとも …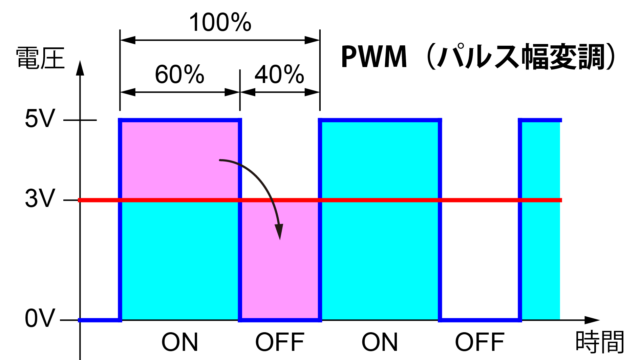 ロボット技術
ロボット技術ArduinoでLEDの明るさを調整しよう!PWM制御でアナログ電圧を出力する
2020-06-28 tajima Tajima Robotics
HIGH(5V)とLOW(0V)のみのデジタル電圧信号とは異なり、アナログ電圧信号では中間の電圧を取り扱うことが出来ます。 そ … ロボット技術
ロボット技術Arduinoでイルミネーションを作ろう!複数の外付けLEDを制御する
2020-06-22 tajima Tajima Robotics
クリスマスの時期にツリーを彩るイルミネーションはとてもキレイです。 ArduinoとLED(発光ダイオード)を使うこと …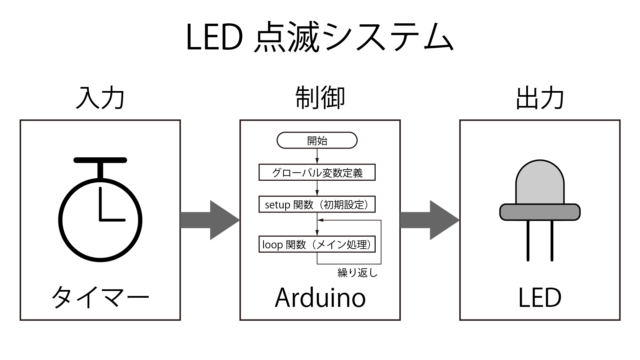 ロボット技術
ロボット技術ArduinoでLEDをチカチカと点滅させよう! Arduinoプログラムの第1歩
2020-06-19 tajima Tajima Robotics
Arduinoを使った電子工作では、色々なものが作れます。 しかし、いきなり複雑なモノを作ろうとすると挫折もしやすいで …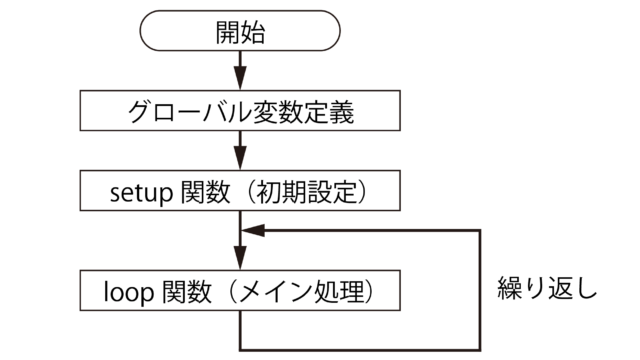 電子工作
電子工作Arduinoのスケッチを学ぼう!プログラムの基本構造を知る
2020-06-15 tajima Tajima Robotics
電子工作にArduinoを使うことで、様々なものづくりを行うことが出来ます。 ただ、やっぱり何か難しそうという印象もあると思います。
… 制御工学
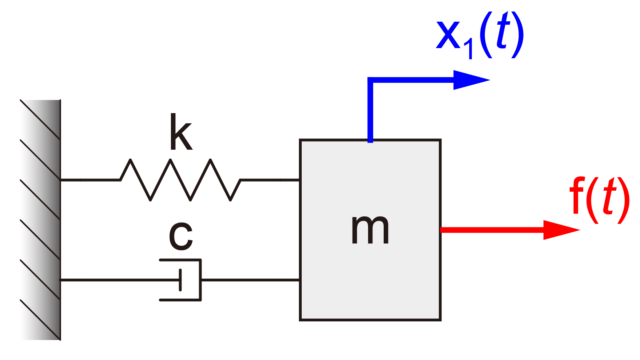
制御工学1自由度振動系の運動をマスターする:制御工学の基礎
2020-06-13 tajima Tajima Robotics
制御工学を学ぶ上で、システムの運動を理解することは重要です。 様々な機械システムの基本として、1つの質量にばねとダンパ …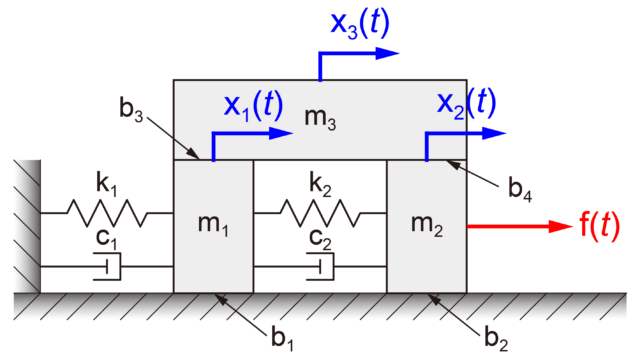 制御工学
制御工学3自由度系の伝達関数を導出する:摩擦を含む3質量-ばね-ダンパーシステム
2020-06-09 tajima Tajima Robotics
伝達関数を用いることで、システムの応答を求めたり、制御パラメータを決定したりすることが出来ます。 この制御工学において … 制御工学摩擦を含む3自由度系の運動方程式を算出する:質量-ばね-ダンパーシステム
2020-06-06 tajima Tajima Robotics
制御工学の基本である運動方程式について、様々な例題を用いて算出方法を紹介しています。 以前の記事では、摩擦を含む2自由 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
