



スポンサーリンク
ロボットの自己位置推定(Localization)技術についての情報を紹介します。
- カルマンフィルタによる自己位置推定
- 線形動的システムの自己位置推定
- 非線形動的システムの自己位置推定
Contents
カルマンフィルタによる自己位置推定
ロボットや自動運転車を制御するときに、ロボットや車の正確な位置を知ることはとても重要です。
しかし、ロボットを制御するための信号や外部の情報を得るセンサの信号にはノイズが含まれているため、正確な現在位置を得るための情報を得ることが難しくなります。
そこで、不正確な情報の中でもロボットの位置を正確に推定するために、カルマンフィルタ(Kalman Filter)という手法を用います。
自己位置推定の必要性
自動運転車や移動ロボットについて、自己位置推定の必要性について紹介します。
カルマンフィルタでロボットの位置推定をしてみよう! ロボットや自動運転車を制御するときに、ロボットや車の正確な位置を知ることはとても重要です。 しかし、ロボットを制御...
カルマンフィルタの基本式
自己位置推定を実際に行うために必要となるカルマンフィルタの基本式を紹介します。
カルマンフィルタの基本式:カルマンフィルタでロボットの位置推定をしてみよう(2) 今回のシリーズでは、ロボットや自動運転車を制御する際にとても重要となる、ロボットや車の正確な位置を知る方法として、カルマンフィル...
線形動的システムの自己位置推定
実際に線形な動的システムの例を用いて、カルマンフィルタを用いた移動ロボットの自己位置推定を紹介します。
線形動的システム
取り扱う線形動的システムについて説明します。
カルマンフィルタと線形動的システム:カルマンフィルタでロボットの位置推定をしてみよう(3) 今回のシリーズでは、ロボットや自動運転車を制御する際にとても重要となる、ロボットや車の正確な位置を知る方法として、カルマンフィル...
カルマンフィルタによる自己位置推定
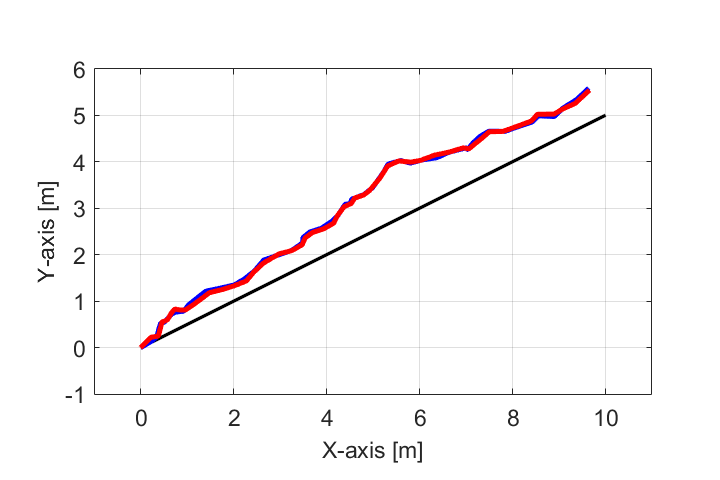
カルマンフィルタによる自己位置推定のアルゴリズムを紹介し、実際にシミュレーションを用いて動作を確認します。
シミュレーションで動作確認:カルマンフィルタでロボットの位置推定をしてみよう(4) 今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いた...
非線形動的システムの自己位置推定
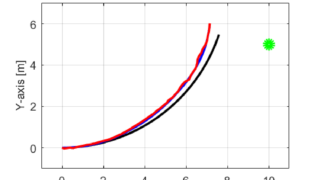
非線形動的システムに用いることが出来る拡張カルマンフィルタについて、実際にシミュレーションで例を用いながら拡張カルマンフィルタによる移動ロボットの自己位置推定について紹介します。
拡張カルマンフィルタって何?:カルマンフィルタでロボットの位置推定をしてみよう(5) 今回のシリーズでは、自動運転車や移動ロボットを制御するためにとても重要な正確な位置を知る方法として、カルマンフィルタを用いたロボ...
非線形動的システムの状態空間モデル:カルマンフィルタでロボットの位置推定をしてみよう(6) 今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いた...
拡張カルマンフィルタとヤコビ行列:カルマンフィルタでロボットの位置推定をしてみよう(7) 今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いた...
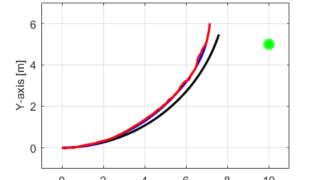
拡張カルマンフィルタのシミュレーション結果:カルマンフィルタでロボットの位置推定をしてみよう(8) 今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いた...
スポンサーリンク
スポンサーリンク




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
