



本記事は、2自由度振動系で学ぶ制御工学入門の第1回です。
本シリーズでは、2自由度振動系の制御を通して制御工学の基礎知識を学びます。
制御工学は、ロボットや機械を自由に動かすために重要で必要となる学問です。
機械系やロボット系に関係する方にとって、この制御工学の内容は避けては通れないものです。
ぜひ身に着けたい知識でもあります。
制御工学理論を学ぶ際の難しいポイントとして
- 様々な理論や色々なシステムにより頭が混乱する
- システムが複雑になると急に分からなくなる
があると思います。
まず、制御工学を学ぶ中では、様々な理論に対し色々なシステムが紹介されます。
どれも重要な知識ですが、結果的に与えられる情報量が多すぎて頭が混乱するという問題が出てきます。
加えて、システムが単純である1自由度系の時はまだ理解できたけど、2自由度系以上になると使用する数式が複雑になってくる。
その結果、何をしているのかよく分からなくなるという問題もあると思います。
そこで本シリーズでは、2自由度振動系をシリーズを通して取り扱います。
2自由度系を通して、システム制御で必要となる基本的な制御工学論の知識を理解することを目的とします。
シリーズ第1回の本記事では、制御工学理論についての基本知識と、なぜ制御工学理論が重要かという点を説明します。
加えて、本シリーズで取り扱う2自由度振動系についても紹介します。
- システム制御工学とは
- システム制御工学の基本知識
- 制御に必要な2自由度振動系の予備知識
システム制御工学とは
まず始めにシステム制御工学における制御とは何なのかについて紹介します。
そしてシステム制御を構成する3つの項目についても紹介します。
制御とは
制御とは、対象のシステムを思い通りに操ることです。
制御を行うためにコントローラ(制御器)が重要になります。
コントローラを設計することで、思い通りに対象のシステムを操ることを実現します。
制御の3項目
システム制御を構成する項目として
- 制御対象
- 目標状態
- 制御手法
の3つの項目があります。
制御対象とは、思い通りに操りたいシステムの事です。
ロボットや機械、物など制御したい対象は色々とあります。
これら制御対象を思い通りに動かしたい目標の値(状態)の事を目標状態と言います。
この目標状態になるようにシステムの制御を行います。
そして制御手法とは、目標状態になるように制御対象を制御する手法のことです。
この制御手法には様々な種類があり、目的によって選択します。
システム制御工学の基本知識
ここでは、システム制御工学を学ぶ中で良く出てくる語句として、古典制御理論と現代制御理論、フィードバック制御を紹介します。
古典制御理論と現代制御理論
制御工学には大きく古典制御理論と現代制御理論があります。
古典制御理論とは、制御対象を伝達関数による線形の入出力システムで表し、周波数領域にてシステムの挙動や応答を制御する理論のことです。
古典制御としては、PID制御が広く知られており、今でも様々な分野で用いられています。
現代制御理論とは、制御対象を状態方程式による1階の常微分方程式で表し、数学的に挙動や応用を制御する理論のことです。
現代制御は、多入力多出力のシステムを表せることで、複雑な制御対象の制御に用いられています。
フィードバック制御
フィードバック制御とは、検出器により得られた現在の値と目標値とを比較しながら、目標値に近づけるように制御する手法のことです。

フィードバック制御では、制御に目標値と現在値(測定値)の差を使用します。
この目標値と測定値の差を基に、制御器で制御対象の操作量を決定します。
このフィードバック制御により、制御対象を目標値にそって制御することが可能になります。
また、制御対象をモデル化した際に生じる誤差や、外乱による誤差に対しても強くなるという利点があります。
2自由度振動系の制御
本シリーズで取り扱う2自由度振動系について紹介します。
2自由度振動系とは
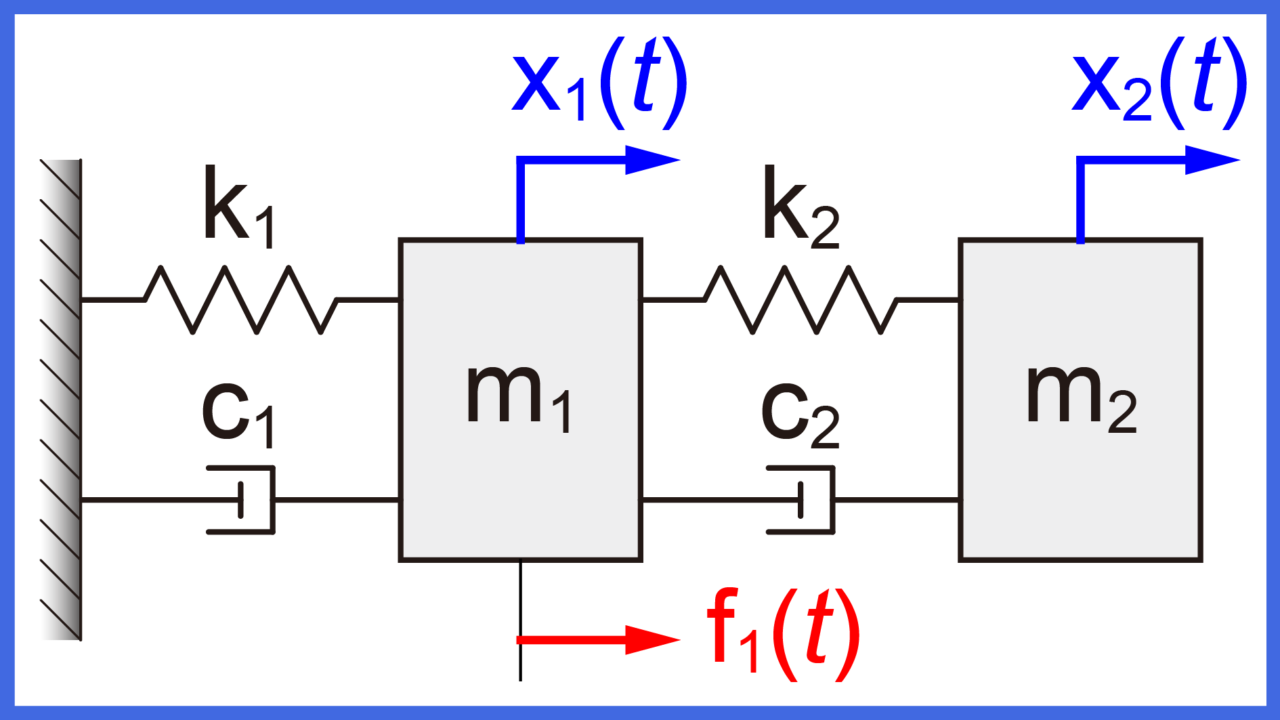
2自由度振動系とは、その名の通り2つの自由度を持ち振動するシステムのことです。
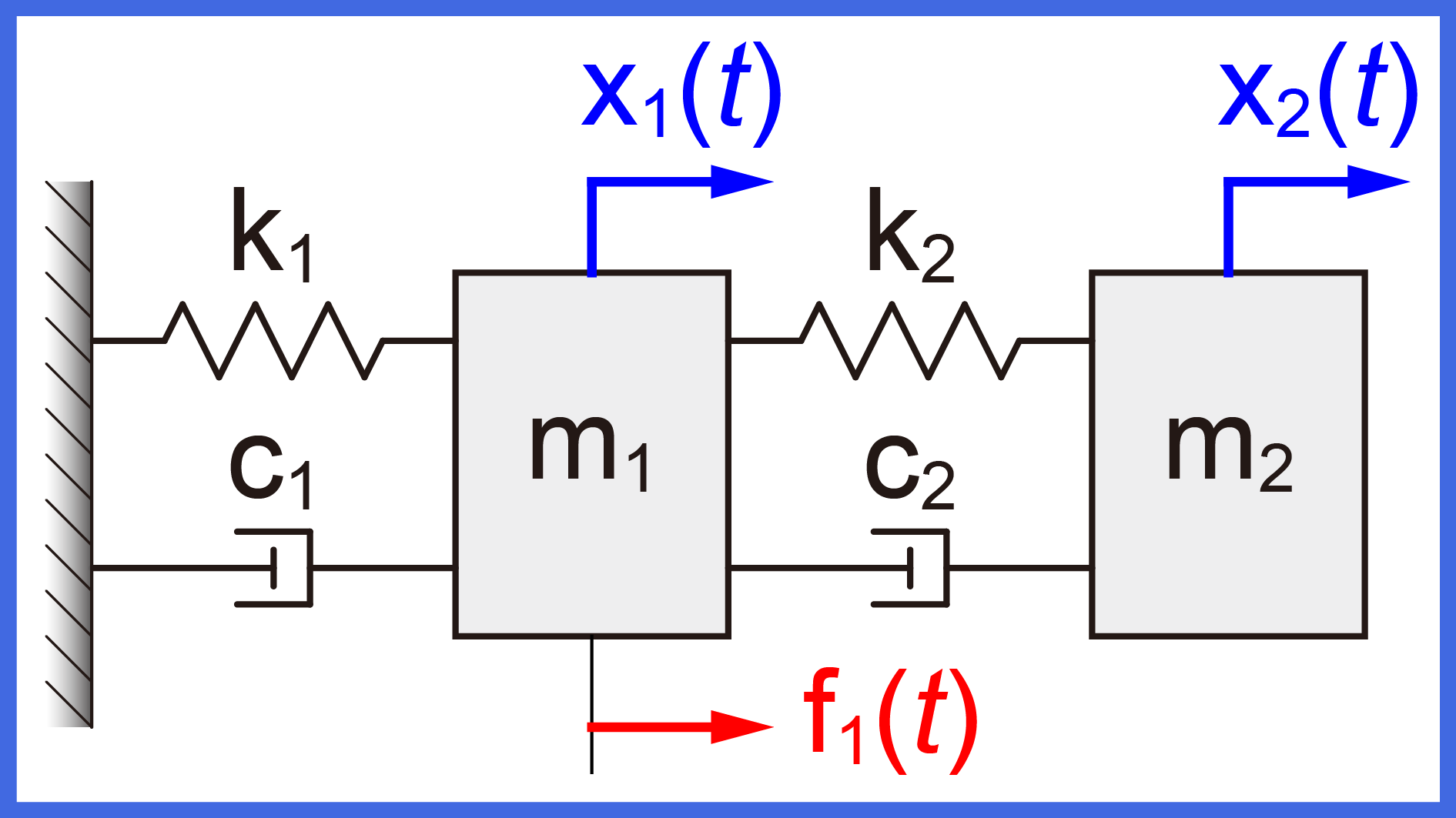
図のように、2つの質量(m1とm2)が、ばね(k1とk2)とダンパー(c1とc2)により接続されています。
本シリーズでは、この2自由度振動系に対して質量m1に力f1が与えられたときの質量m2の位置x2の制御を目的とします。
1自由度系と多自由度系の比較
システムに含まれる質量が1つのみである場合、そのシステムは1自由度系となります。
この1自由度系を制御する場合、位置を制御したい質量に力を直接与えることで制御を行います。
そのため、比較的イメージがしやすくシンプルに対象を制御することが出来ます。
一方で、質量が2つ以上(複数個)あるシステムを多自由度系を言います。
本シリーズで取り扱うモデルは、2つの質量を含んでいるため2自由度系となります。
このような多自由度系では、位置を制御したい質量に間接的に与えられる力を考慮する必要があります。
例えば、質量1に与えられた力により動かされる質量2の位置などです。
これにより、次に示すようにシステムが複雑化し、制御が難しくなることが考えられます。
2自由度振動系の難しさ
2自由度系(他自由度系)では、もちろんそれぞれの質量に対して力と運動の関係を考える必要があります。
加えて、互いに質量の運動が影響しあうため、これらの作用も考慮する必要があります。
その結果、運動を表す数式が複雑となり、理解が難しくなります。
また、直接制御したい質量に力を与えないことも2自由度系の制御を難しくしています。
本シリーズで取り扱う2自由度振動系モデルでは、質量1に力を与えて質量2の位置を制御します。
そのため質量1を目標通りに動かしても、質量2が同様に動くとは限りません。
そこで、本シリーズで学ぶ制御工学の知識を活かして2自由度系の制御を実現します。
まとめ
今回は、システムを制御工学の基本知識を紹介しました。
また、本シリーズで取り扱う2自由度振動系についても説明しました。
2自由度振動系は一般的なモデルであるため、様々な制御対象に応用が可能であると考えています。
次回以降では、この2自由度振動系モデルを用いて制御工学の基礎知識を学んでいきます。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
