



今回は質量-ばね-ダンパーシステム(Damped Mass Spring System)を用いて、モデルの振動(運動)について考えていきたいと思います。
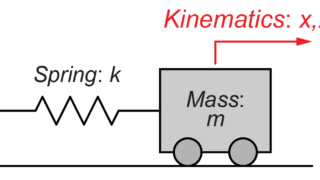
シンプルな質量-ばね-システムを用いた前回の記事はこちら
質量-ばね-ダンパーシステムの運動方程式
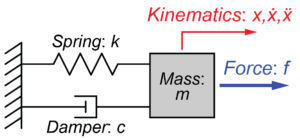
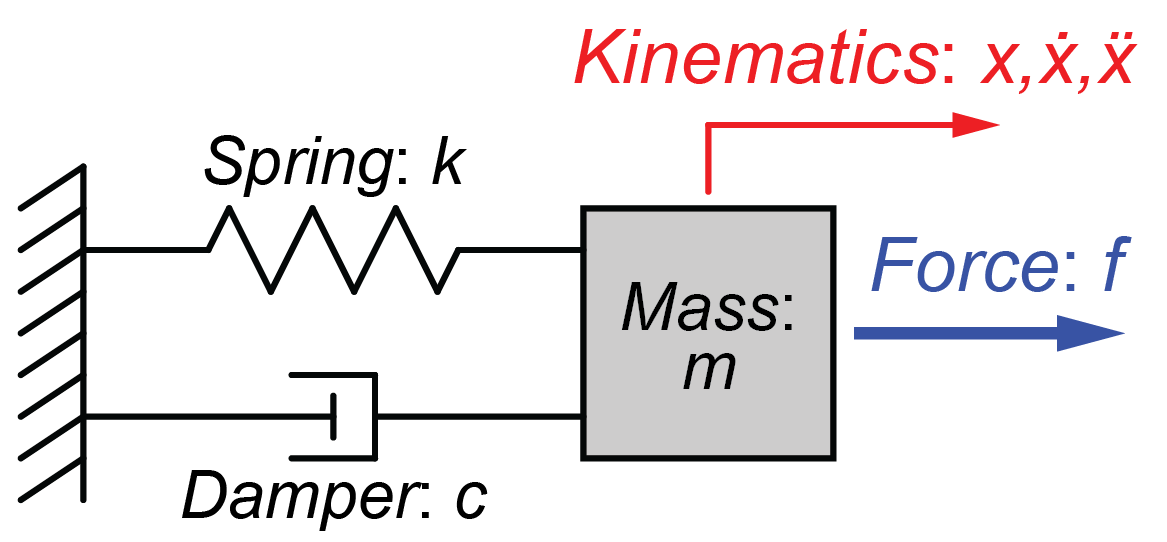
今回は図のように質量\(m\)がばね\(k\)とダンパー\(c\)で壁に接続されているモデルを扱います。
このシステムの質量\(m\)の運動方程式を求めていきます。
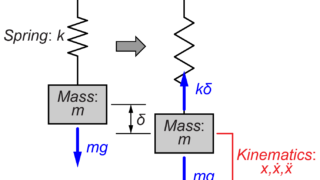
質量\(m\)の変位を\(x\)、速度を\(\dot{x}\)とすると、ばね\(k\)とダンパー\(c\)による力は、
$$ k x + c \dot{x} $$
となります。
よって、このシステムの運動方程式は加速度\(\ddot{x}\)を用いて、
$$ m \ddot{x} = – k x – c \dot{x} $$
と表すことが出来ます。
この運動方程式を基にシステムの運動を算出していきます。
質量-ばね-ダンパーシステムの微分方程式
質量-ばね-ダンパーシステムの運動方程式を整理すると、
$$ \ddot{x}(t) + \frac{c}{m} \dot{x}(t) + \frac{k}{m} x(t) = 0 $$
と表すことが出来ます。
この線形微分方程式を変位\(x(t)\)について解いていきます。
変位\(x(t)\)を、
$$ x(t) = e^{ \lambda t} $$
と置くと、上記の線形微分方程式は、
$$ \ddot{x}(t) + \frac{c}{m} \dot{x}(t) + \frac{k}{m} x(t) = 0 $$
$$ \Rightarrow \lambda^2 e^{ \lambda t} + \frac{c}{m} \lambda e^{ \lambda t} + \frac{k}{m} e^{ \lambda t} = 0 $$
$$ \Rightarrow \lambda^2 + \frac{c}{m} \lambda + \frac{k}{m} = 0 $$
と置き換えることが出来ます。
この方程式を\(\lambda\)について解くと、
$$ \lambda = – \frac{c}{2 m} \pm \frac{1}{2} \sqrt{\left( \frac{c}{m} \right)^2 – \frac{4 k}{m} } $$
となります。
この求めた\(\lambda\)の値を先ほど定義した\(x(t)\)の式に代入することでシステムの運動がわかります。
ここで、\(\lambda\)の値によって3パターンの解\(x(t)\)が存在します。
質量-ばね-ダンパーシステムの3パターンの解
質量-ばね-ダンパーシステムの解は定数の値によって、3パターンに分類されます。
- \(\lambda =\)実数
- \(\lambda_1 = \lambda_2\)
- \(\lambda =\)複素数
\(\lambda\)が実数の場合
\(\lambda_1\)と\(\lambda_2\)が実数の場合、求められる解\(x(t)\)は、
$$ x(t) = C_1 e^{- \lambda_1 t} + C_2 e^{- \lambda_2 t}$$
と表すことが出来ます。
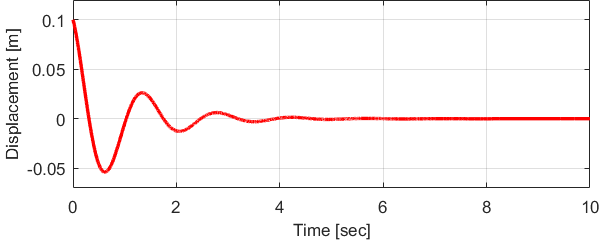
この時の変位\(x(t)\)は時間\(t\)の増加とともに徐々に減衰していきます。
このようなシステムを加減衰システム(Overdamped System)といいます。
\(\lambda_1 = \lambda_2\)の場合
\(\lambda_1\)と\(\lambda_2\)が等しい場合、このシステムを臨界減衰システム(Critically Damped System)と言います。
\(\lambda_1\)と\(\lambda_2\)が等しくなるために、下記の関係が成り立ちます。
$$ \left( \frac{c}{m} \right)^2 – \frac{4 k}{m} $$
$$ \Rightarrow c = 2 \sqrt{k m} $$
となります。
この時の\(c\)の値を臨界減衰係数\(c_{CR}\)と言います。
臨界減衰システムの場合(\(\lambda_1 = \lambda_2 = \lambda \))の解\(x(t)\)は、
$$ x(t) = C_1 e^{- \lambda t} + C_2 t e^{- \lambda t}$$
と表されます。
\(\lambda\)が複素数の場合
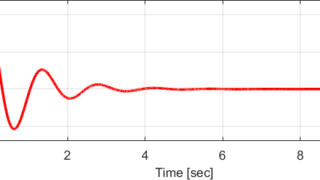
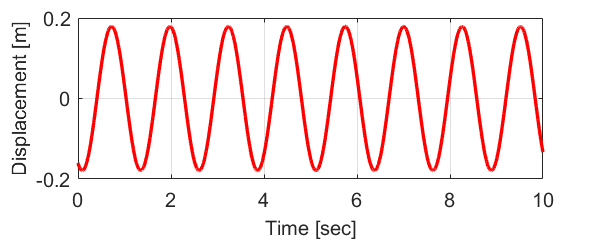
\(\lambda_1\)と\(\lambda_2\)が複素数の場合、このシステムを不足減衰システム(Underdamped System)と言います。
複素数の\(\lambda\)の値を
$$ \lambda = \alpha \pm \beta i $$
とすると、求める解\(x(t)\)は、
$$ x(t) = e^{- \frac{c}{2 m} t} \left( A \cos(\omega_d t) + B \sin(\omega_d t) \right) $$
と表すことが出来ます。
まとめ
今回は、質量-ばね-ダンパーシステムを用いて、システムの運動を表す式を算出する方法を紹介しました。
質量-ばね-ダンパーシステムは、モデルの定数(パラメータ)の値によって、3種類の動作に分類することが出来ます。
次回は、具体的な値を使って、質量-ばね-ダンパーシステムの動きを実際に計算していきたいと思います。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
