



ロボットなどの動的システムを示す伝達関数を用いて、システムの入力に対するシステムの応答の様子を算出することが出来ます。
前回は、1次遅れ系システムについて、伝達関数からシステムのステップ応答の特性を算出する方法を紹介しました。

今回は、2次遅れ系システムについて、システムの伝達関数の基本形とそのステップ応答について紹介します。
2次遅れ系システムの伝達関数
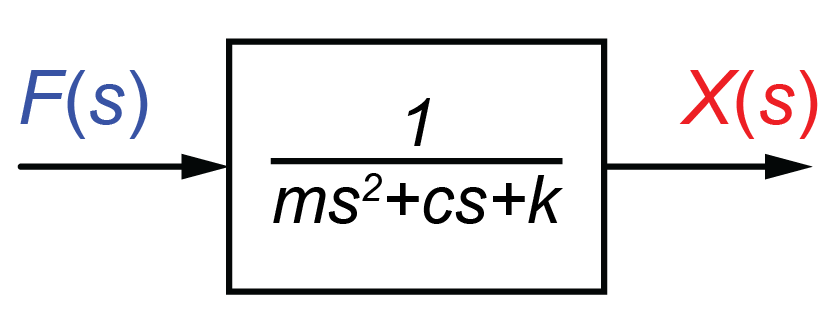
2次遅れ系システムの伝達関数T(s)は、
$$ T(s) = \frac{{\omega_n}^2}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
と表すことが出来ます。
伝達関数T(s)から分かるように、分母に含まれる項の中で一番大きい(s)の乗数は2です。
そのため、このような形の伝達関数を持つシステムを2次遅れ系システムを言います。
伝達関数T(s)の中に含まれている記号について、ωnは固有角周波数(Natural Frequency)をζは減衰比(Damping Ratio)を表します。
このような、固有各周波数ωnと減衰比ζを用いて表された伝達関数T(s)からシステムのステップ応答の特性を算出する方法を紹介します。
2次系システムのステップ応答
2次遅れ系システムの伝達関数T(s)の基本形
$$ T(s) = \frac{{\omega_n}^2}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
から、システムにステップ状の入力(ステップ入力)を与えた際のシステムの出力(ステップ応答)の特性
- 固有角周波数(Natural Frequency)
- 減衰比(Damping Ratio)
- 減衰振動の固有角周波数(Damped Frequency)
- 立ち上がり時間(Rise Time)
- 静定時間(Settling Time)
- 最大オーバーシュート量(Percentage Overshoot)
- 最大オーバーシュート時間(Peak Time)
を算出する方法を紹介します。
固有角周波数と減衰比と減衰振動の固有角周波数
先程紹介したように、2次系システムの伝達関数より、固有角周波数ωnと減衰比ζを得ることが出来ます。
これらの値を用いることで、減衰振動の固有角周波数(Damped Frequency)を求めることが出来ます。
システムの減衰振動の固有角周波数ωdは、固有角周波数ωnと減衰比ζより、
$$ \omega_d = \omega_n \sqrt{1 – \zeta^2} $$
となります。
立ち上がり時間
システムにステップ入力を与えた際のシステムの応答について、出力が最終値の10%から90%までに要する時間を立ち上がり時間(Rise Time)と言います。
2次遅れ系システムの立ち上がり時間Trは、
$$ T_r = \frac{1.76\zeta^3-0.417\zeta^2+1.039\zeta+1}{\omega_n} $$
で求めることが出来ます。
この立ち上がり時間の算出方法Trは、1次遅れ系システムと場合と同様の手順で求めることが出来ます。
2次遅れ系システムの伝達関数
$$ T(s) = \frac{{\omega_n}^2}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
から、逆ラプラス変換を用いて時間領域tでのシステムのステップ応答を求めることが出来ます。
ステップ応答に対する2次遅れ系システムの伝達関数は、
$$ G(s) = \frac{1}{s} \frac{{\omega_n}^2}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
$$ = \frac{1}{s} – \frac{s + 2 \zeta \omega_n}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
$$ = \frac{1}{s} – \frac{s + 2 \zeta \omega_n}{(s+\zeta \omega_n)^2 + {\omega_n}^2-\zeta^2 {\omega_n}^2} $$
$$ = \frac{1}{s} – \frac{s + \zeta \omega_n}{(s+\zeta \omega_n)^2 + {\omega_n}^2 \left(1 – \zeta^2 \right)} – \frac{\frac{\zeta \omega_n}{\omega_n \sqrt{1 – \zeta^2}} \omega_n \sqrt{1 – \zeta^2}}{(s+\zeta \omega_n)^2 + {\omega_n}^2 \left(1 – \zeta^2 \right)} $$
$$ = \frac{1}{s} – \frac{s + \zeta \omega_n}{(s+\zeta \omega_n)^2 + {\omega_d}^2} – \frac{\frac{\zeta}{\sqrt{1 – \zeta^2}} \omega_d}{(s+\zeta \omega_n)^2 + {\omega_d}^2} $$
と表すことが出来ます。
この式に対して逆ラプラス変換を行うと
$$ g(t) = 1 – e^{-\zeta \omega_n t} \cos(\omega_d t) – \frac{\zeta}{\sqrt{1 – \zeta^2}} e^{-\zeta \omega_n t} \sin(\omega_d t) $$
$$ = 1 – \frac{1}{\sqrt{1 – \zeta^2}}e^{-\zeta \omega_n t} \sin \left( \omega_d t + \tan^{-1}\left(\frac{\sqrt{1-\zeta^2}}{\zeta}\right) \right)$$
と、時間領域tでのステップ応答を求めることが出来ました。
これより、最終値の10%と90%とになる時刻を求め、その差を計算することで、立ち上がり時間Trを得ることが出来ます。
1次遅れ系システムとは異なり、2次系システムは複雑で立ち上がり時間は非線形な特性となっているため、MATLAB等の計算ソフトを用いて、固有角周波数ωnと減衰比ζが与えられた際の立ち上がり時間Trを近似すると、
$$ T_r = \frac{1.76\zeta^3-0.417\zeta^2+1.039\zeta+1}{\omega_n} $$
となります。
まとめ
今回は、ロボットなどの動的システムを表した2次遅れ系システムの伝達関数から、システムのステップ入力に対するステップ応答の特性として立ち上がり時間を算出する方法を紹介しました。
次回は、2次系システムのステップ応答特性について、他の特性を算出する方法を紹介したいと思います。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
