



制御工学の基本である運動方程式について、様々な例題を用いて算出方法を紹介しています。
以前の記事では、摩擦を含む2自由度の質量-ばね-ダンパーシステムについて、運動方程式の算出する考え方を紹介しました。
今回は3自由度系の質量-ばね-ダンパーシステムについて、運動方程式を算出する流れを紹介します。
取り扱う3自由度システム
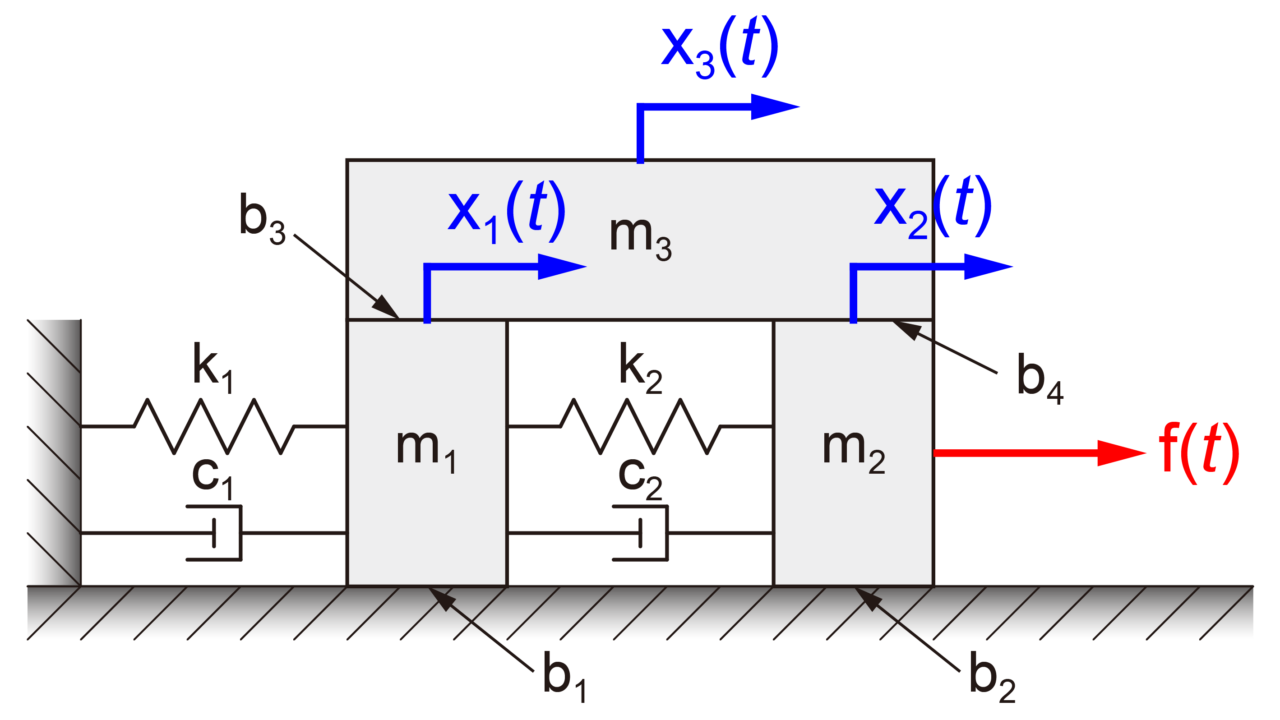
今回の記事では、下図に示すような3自由度系のモデルを取り扱います。
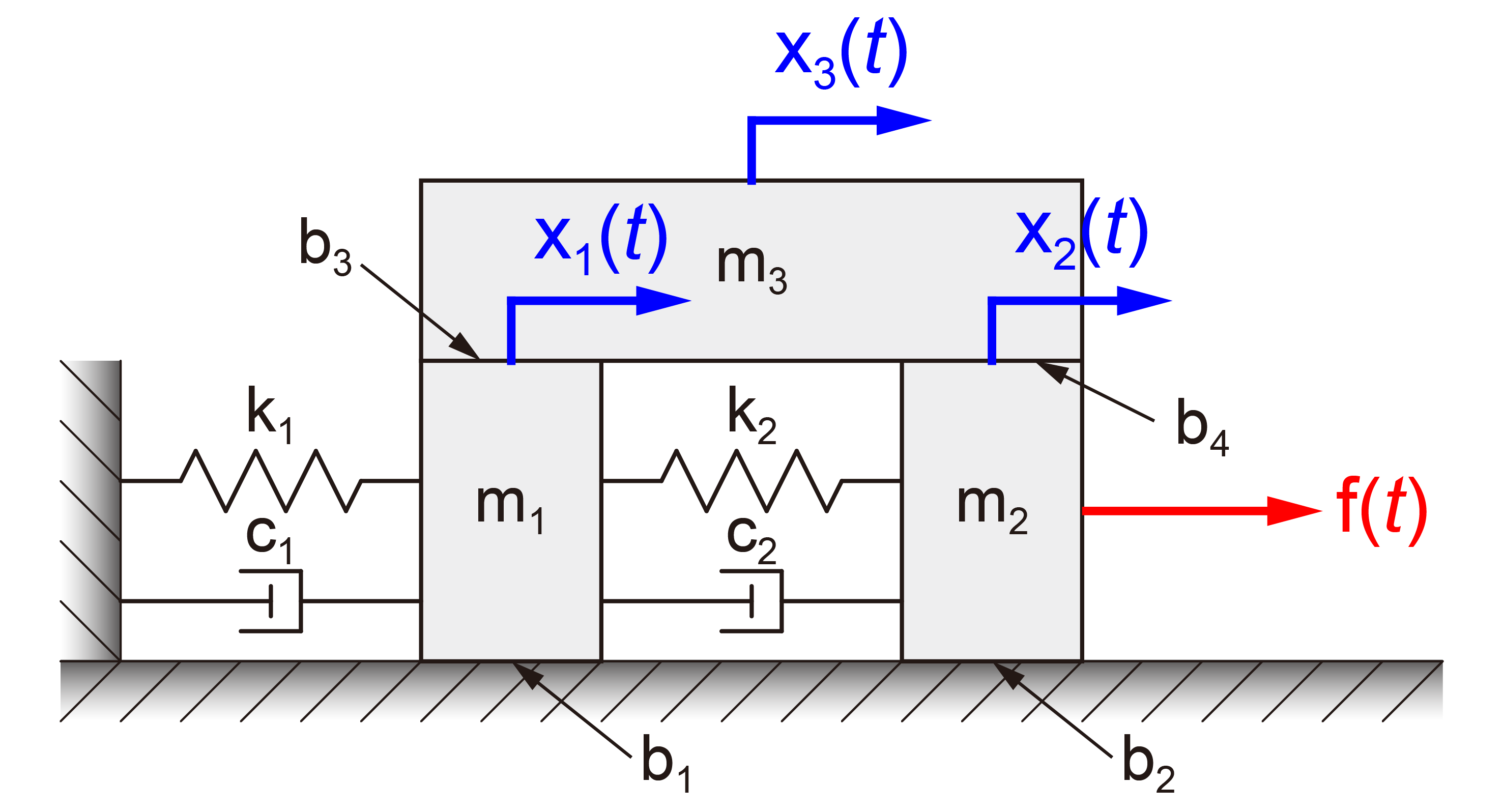
図に示すように、3つの質量がばねやダンパーで繋がれ、各質量の間には摩擦が生じています。
この摩擦を含めた3自由度の質量-ばね-ダンパーシステムについて、運動方程式を算出していきます。
3自由度系の運動方程式の算出
取り扱う3自由度系の運動方程式を求めるために、各質量(m1、m2、m3)に加わる力の関係式を求めていきます。
質量m1について
質量m1に影響する力を考えます。
質量m1には、
- 質量m1の運動による力
- 壁との間に接続されたばねk1とダンパーc1による力
- 床との間に生じる摩擦b1による力
- 質量m2との間に接続されたばねk2とダンパーc2による力
- 質量m3との間に生じる摩擦b3による力
が加わります。
これら質量m1に関する力を図で表すと下図のようになります。
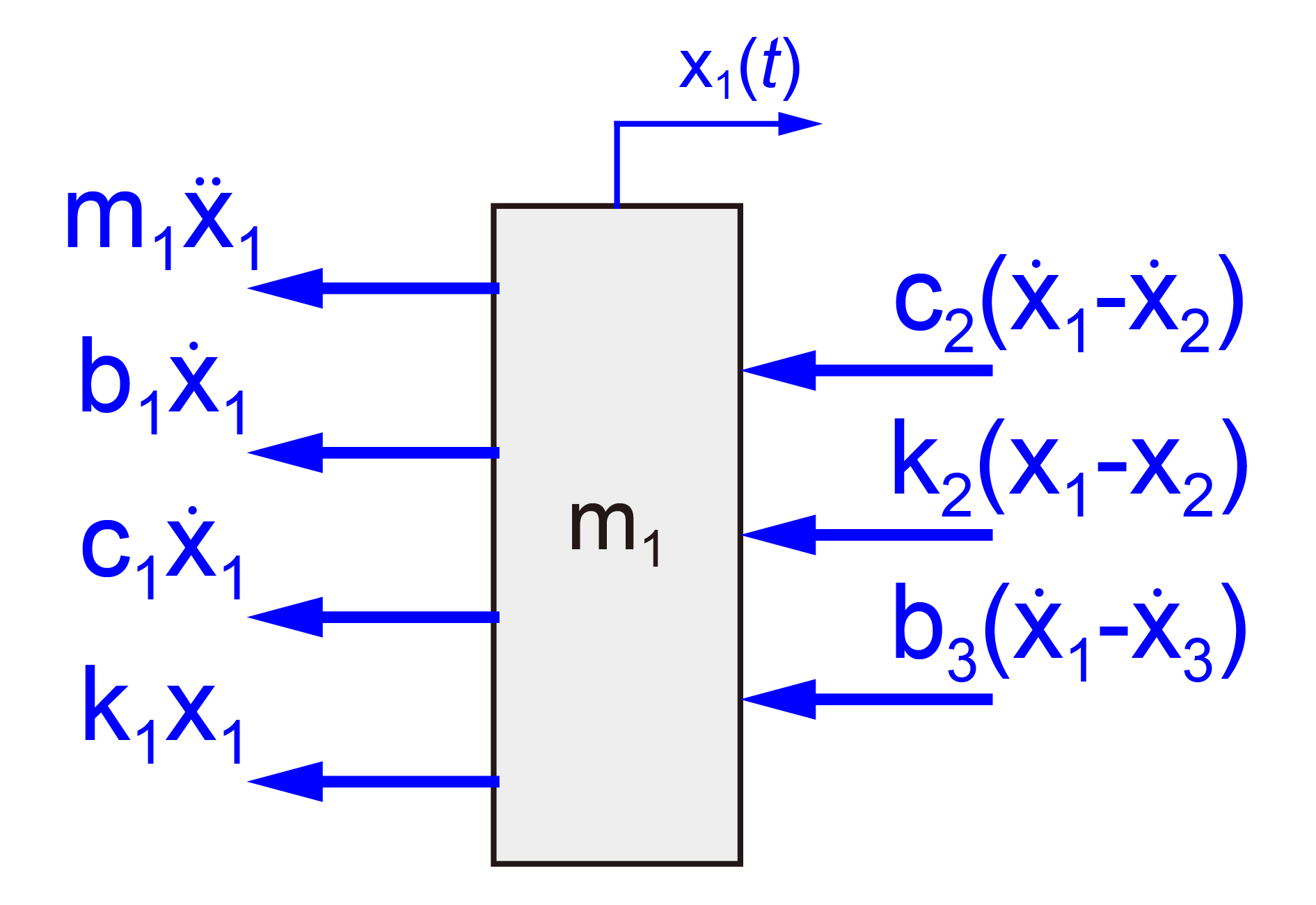
この質量m1に加わる力の関係を式で表すと
$$ m_1 \ddot{x}_1(t) + b_1 \dot{x}_1(t) + c_1 \dot{x}_1(t) + k_1 x_1(t) + c_2 \left( \dot{x}_1(t) – \dot{x}_2(t) \right) + k_2 \left( x_1(t) – x_2(t) \right) + b_3 \left( \dot{x}_1(t) – \dot{x}_3(t) \right) = 0 $$
となります。
この質量m1の関係式を整理すると
$$ m_1 \ddot{x}_1(t) + \left( c_1 + c_2 + b_1 + b_3 \right) \dot{x}_1(t) + \left( k_1 + k_2 \right) x_1(t) – c_2 \dot{x}_2(t) – k_2 x_2(t) – b_3 \dot{x}_3(t) = 0 $$
のように、質量m1に関する運動方程式を求めることが出来ました。
質量m2について
同様に、質量m2に影響する力を考えます。
質量m2には、
- 質量m2の運動による力
- 質量m1との間に接続されたばねk2とダンパーc2による力
- 床との間に生じる摩擦b2による力
- 質量m3との間に生じる摩擦b4による力
が加わります。
そして、質量m2には力fが加わっています。
これら質量m2に関する力は下の図のように表されます。
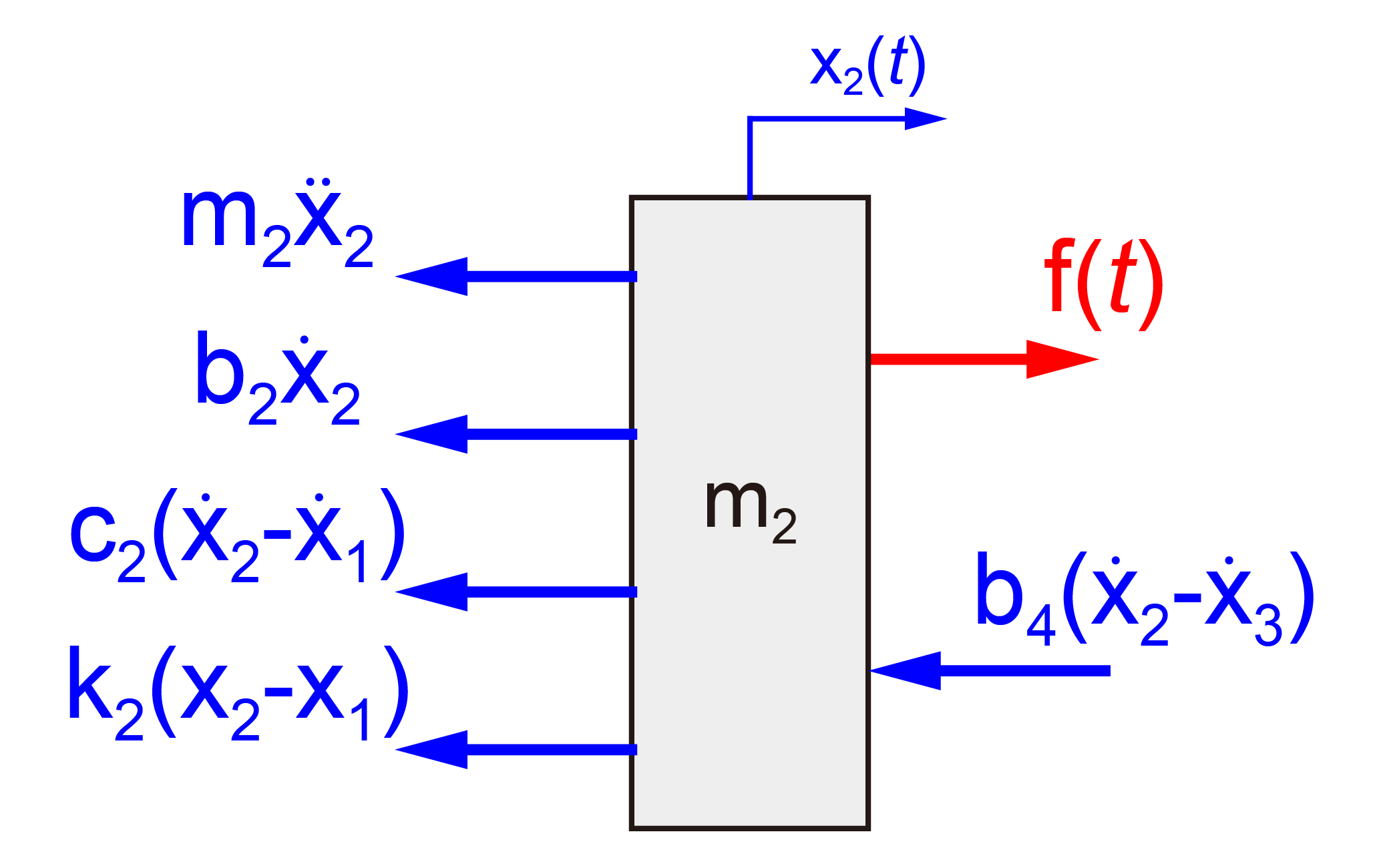
この質量m2に加わる力の関係を式で表すと
$$ m_2 \ddot{x}_2(t) + b_2 \dot{x}_2(t) +c_2 \left( \dot{x}_2(t) – \dot{x}_1(t) \right) + k_2 \left( x_2(t) – x_1(t) \right) + b_4 \left( \dot{x}_2(t) – \dot{x}_3(t) \right) = f(t) $$
となります。
この関係式を整理すると
$$ m_2 \ddot{x}_2(t) + \left( c_2 + b_2 + b_4 \right) \dot{x}_2(t) + k_2 x_2(t) – c_2 \dot{x}_1(t) – k_2 x_1(t) – b_4 \dot{x}_3(t) = f(t) $$
のように、質量m2に関する運動方程式を得られました。
質量m3について
最後に、質量m3に影響する力を考えます。
質量m3には、
- 質量m3の運動による力
- 質量m1との間に生じる摩擦b3による力
- 質量m2との間に生じる摩擦b4による力
が加わります。
これらの力を質量m3の関係式としてまとめると、
$$ m_3 \ddot{x}_3(t) + b_2 \left( \dot{x}_3(t) – \dot{x}_1(t) \right) + b_4 \left( \dot{x}_3(t) – \dot{x}_2(t) \right) = 0 $$
となります。
この関係式を整理することで、質量m3についての運動方程式
$$ m_3 \ddot{x}_3(t) + \left( b_3 + b_4 \right) \dot{x}_3(t) – b_3 \dot{x}_1(t) – b_4 \dot{x}_2(t) = 0 $$
を求めることが出来ました。
小まとめ
以上より、今回の記事で取り扱っている3自由度系の運動方程式を
$$ \begin{eqnarray} \left\{ \begin{array}{l} m_1 \ddot{x}_1(t) + \left( c_1 + c_2 + b_1 + b_3 \right) \dot{x}_1(t) + \left( k_1 + k_2 \right) x_1(t) – c_2 \dot{x}_2(t) – k_2 x_2(t) – b_3 \dot{x}_3(t) &=& 0 \\ m_2 \ddot{x}_2(t) + \left( c_2 + b_2 + b_4 \right) \dot{x}_2(t) + k_2 x_2(t) – c_2 \dot{x}_1(t) – k_2 x_1(t) – b_4 \dot{x}_3(t) &=& f(t) \\ m_3 \ddot{x}_3(t) + \left( b_3 + b_4 \right) \dot{x}_3(t) – b_3 \dot{x}_1(t) – b_4 \dot{x}_2(t) &=& 0 \end{array} \right. \end{eqnarray} $$
と導出することが出来ました。
まとめ
今回の記事では、摩擦を考慮した3自由度の質量-ばね-ダンパーシステムについて、運動方程式の算出方法を紹介しました。
取り扱うモデルが複雑になった場合でも、各質量に関する力を考えることで運動方程式を導くことが出来ます。
次回の記事では、今回求めた運動方程式から伝達関数を求める方法を紹介します。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
