



制御工学において、運動方程式や伝達関数の導出はとても重要な項目です。
これら運動方程式と伝達関数の導出方法を身に着けるためには、様々なパターンのシステムを取り扱うことが大事だと考えています。
前回の記事では、摩擦を含む2自由度システムの運動方程式を導出する流れを紹介しました。
今回の記事では、摩擦を含む2質量系の伝達関数を求める方法を紹介します。
取り扱う2自由度システム
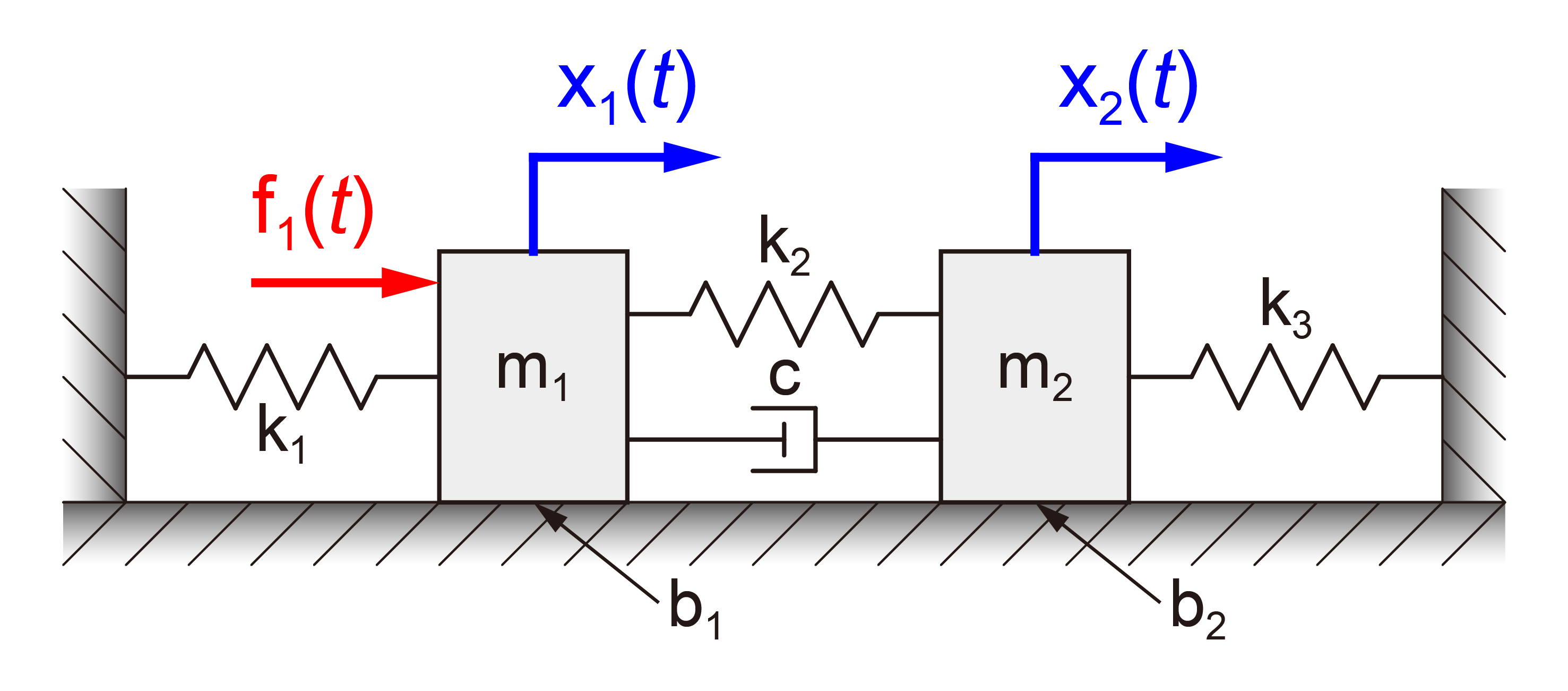
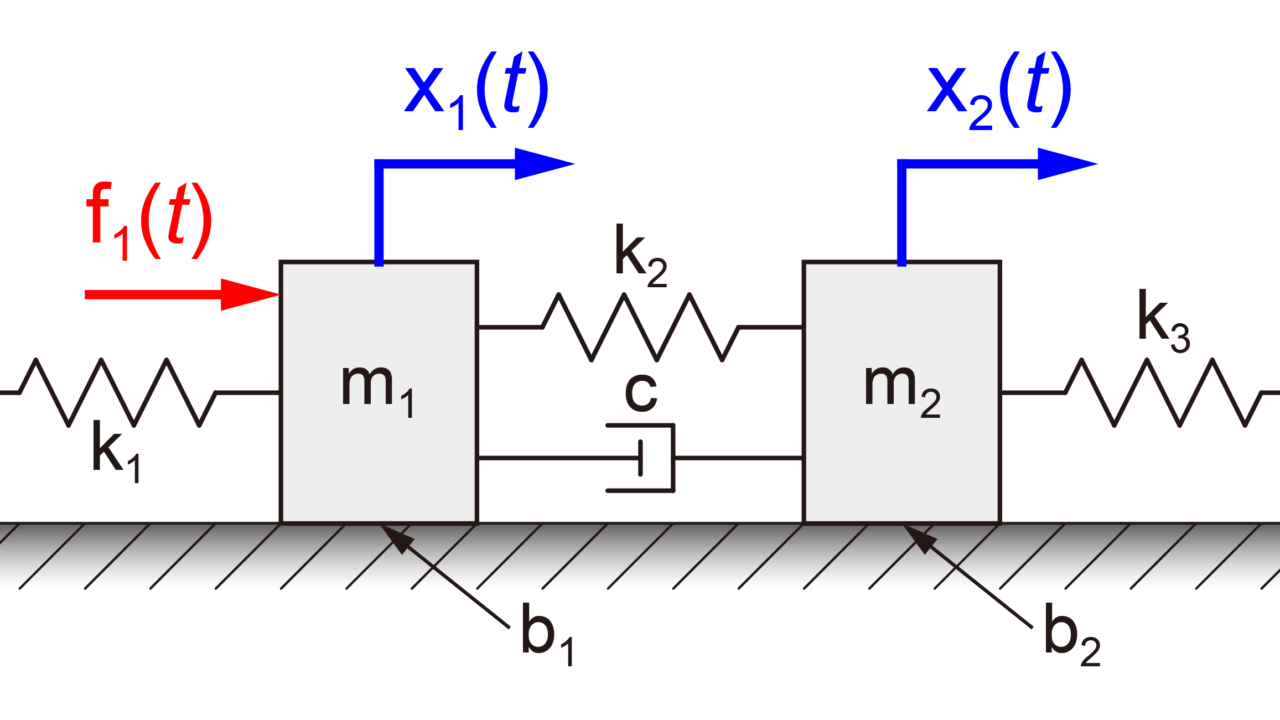
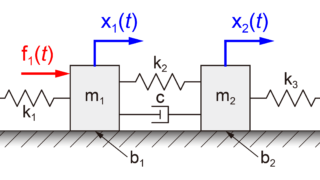
この記事では、上の図のような2自由度の質量-ばね-ダンパーシステムを取り扱います。
前回の記事にて、運動方程式は下記のように算出しました。
$$ \begin{eqnarray} \left\{ \begin{array}{l} m_1 \ddot{x}_1(t) + \left( b_1 + c \right) \dot{x}_1(t) + \left( k_1 + k_2 \right) x_1(t) – c \dot{x}_2(t) – k_2 x_2(t) &=& f_1(t) \\ m_2 \ddot{x}_2(t) + \left( b_2 + c \right) \dot{x}_2(t) + \left( k_2 + k_3 \right) x_2(t) – c \dot{x}_1(t) – k_2 x_1(t) &=& 0 \end{array} \right. \end{eqnarray} $$
今回の記事では、この運動方程式から伝達関数を求めていきたいと思います。
運動方程式をラプラス変換
まず始めに、時間領域tで表されている運動方程式を周波数領域sで表すためにラプラス変換を行います。
時間tについての関数である運動方程式
$$ \begin{eqnarray} \left\{ \begin{array}{l} m_1 \ddot{x}_1(t) + \left( b_1 + c \right) \dot{x}_1(t) + \left( k_1 + k_2 \right) x_1(t) – c \dot{x}_2(t) – k_2 x_2(t) &=& f_1(t) \\ m_2 \ddot{x}_2(t) + \left( b_2 + c \right) \dot{x}_2(t) + \left( k_2 + k_3 \right) x_2(t) – c \dot{x}_1(t) – k_2 x_1(t) &=& 0 \end{array} \right. \end{eqnarray} $$
をラプラス変換により、周波数sについての式で表すと
$$ \begin{eqnarray} \left\{ \begin{array}{l} m_1 s^2 X_1(s) + \left( b_1 + c \right) s X_1(s) + \left( k_1 + k_2 \right) X_1(s) – c s X_2(s) – k_2 X_2(s) &=& F_1(s) \\ m_2 s^2 X_2(s) + \left( b_2 + c \right) s X_2(s) + \left( k_2 + k_3 \right) X_2(s) – c s X_1(s) – k_2 X_1(s) &=& 0 \end{array} \right. \end{eqnarray} $$
となります。
ラプラス変換した式を整理すると、
$$ \begin{eqnarray} \left\{ \begin{array}{l} \left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right) X_1(s) – \left( c s + k_2 \right) X_2(s) &=& F_1(s) \\ – \left( c s + k_2 \right) X_1(s) + \left( m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right) \right) X_2(s) &=& 0 \end{array} \right. \end{eqnarray} $$
となり、運動方程式を時間領域tから周波数領域sに変換することが出来ました。
ラプラス変換の基本については、こちらの記事を参考にしてください。

伝達関数の算出
それでは、先ほどラプラス変換により周波数領域sで表された運動方程式より、伝達関数を算出します。
今回は、力F1に対する各質量の位置(X1とX2)について伝達関数で表したいと思います。
質量1について
最初に、入力として力F1(s)が与えられた時の質量m1の位置X1(s)を出力とする伝達関数G1(s)
$$ G_1(s) = \frac{X_1(s)}{F_1(s)} $$
を求めていきます。
ラプラス変換後の運動方程式の第2式
$$ – \left( c s + k_2 \right) X_1(s) + \left( m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right) \right) X_2(s) = 0 $$
より、質量m2の位置X2(s)を質量m1の位置X1(s)を用いて表すと
$$ X_2(s) = \frac{c s + k_2}{m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right)} X_1(s) $$
となります。
これをラプラス変換後の運動方程式の第1式
$$ \left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right) X_1(s) – \left( c s + k_2 \right) X_2(s) = F_1(s) $$
に代入すると
$$ \left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right) X_1(s) – \left( c s + k_2 \right) \frac{c s + k_2}{m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right)} X_1(s) = F_1(s) $$
となります。
この式を整理すると、力F1(s)に対する質量m1の位置X1(s)を表す伝達関数G1(s)は、
$$ G_1(s) = \frac{X_1(s)}{F_1(s)} = \frac{m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right)}{\left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right)\left( m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right) \right) – \left( c s + k_2 \right)^2} $$
と求めることが出来ました。
質量2について
同様に、入力として力F1(s)が与えられた時の質量m2の位置X2(s)を出力とする伝達関数G2(s)
$$ G_2(s) = \frac{X_2(s)}{F_1(s)} $$
を求めていきます。
ラプラス変換後の運動方程式の第2式
$$ – \left( c s + k_2 \right) X_1(s) + \left( m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right) \right) X_2(s) = 0 $$
について、今度は質量m1の位置X1(s)を質量m2の位置X2(s)を用いて表すと
$$ X_1(s) = \frac{m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right)}{c s + k_2} X_2(s) $$
となります。
この式をラプラス変換後の運動方程式の第1式
$$ \left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right) X_1(s) – \left( c s + k_2 \right) X_2(s) = F_1(s) $$
に代入することで
$$ \left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right) \frac{m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right)}{c s + k_2} X_2(s) – \left( c s + k_2 \right) X_2(s) = F_1(s) $$
が得られます。
これより、力F1(s)に対する質量m2の位置X2(s)を表す伝達関数G2(s)は、
$$ \frac{X_2(s)}{F_1(s)} = \frac{c s + k_2}{\left( m_1 s^2 + \left( b_1 + c \right) s + \left( k_1 + k_2 \right) \right)\left( m_2 s^2 + \left( b_2 + c \right) s + \left( k_2 + k_3 \right) \right) – \left( c s + k_2 \right)^2} $$
となることが分かりました。
まとめ
今回の記事では、摩擦を含む2質量系システムについて伝達関数を求める方法を紹介しました。
力の関係式より算出した運動方程式をラプラス変換することで、伝達関数を求めることが出来ます。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
