



ロボット等の自動制御系を取り扱うために、伝達関数を用いる方法があります。
今回は、質量にばねとダンパーが含まれているシステムに対して、伝達関数を求める方法を紹介します。
取り扱うシステム
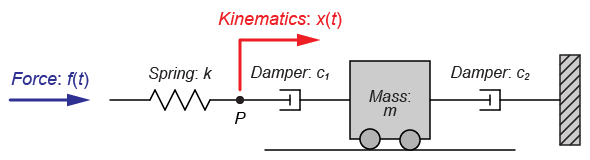
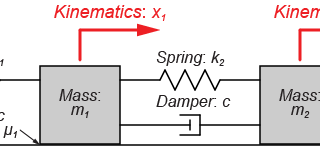
図のように質量\(m\)とばね\(k\)、2つのダンパー(\(c_1\)と\(c_2\))からなるシステムを取り扱います。
質量\(m\)の両端にダンパー(\(c_1\)、\(c_2\))が接続されています。
そして、右側のダンパー\(c_2\)は、固定された壁に取り付けられています。
さらに、左側のダンパー\(c_1\)は、ばね\(k\)に接続されています。
システム内の各パラメータは、
$$ m = 10 [kg] $$
$$ k = 2 [N/m] $$
$$ c_1 = 5 [N \cdot s/m] $$
$$ c_2 = 2 [N \cdot s/m] $$
とします。
今回は、このばね\(k\)の左側から力\(f(t)\)が加わった時の点\(P\)の変位\(x(t)\)について伝達関数\(G(s)=\frac{X(s)}{F(s)}\)を求めていきます。
運動方程式を求める
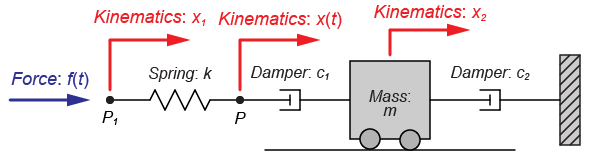
ばねの左側の点(力が加わっている点)\(P_1\)の変位を\(x_1\)、質量の変位を\(x_2\)とします。
この各箇所(\(P_1\)、\(P\)、質量\(m\))についての運動方程式は、
$$ f(t) = 2 (x_1(t) – x(t)) $$
$$ 0 = 2 (x(t) – x_1(t)) + 5 (\dot{x}(t) – \dot{x}_2(t)) $$
$$ 0 = 10 \ddot{x}_2(t) + 5 (\dot{x}_2(t) – \dot{x}(t)) + 2 \dot{x}_2(t) $$
と求めることが出来ます。
この運動方程式についてラプラス変換を行い、時間領域\(t\)から周波数領域\(s\)に変換していきます。
ラプラス変換を行う
算出した運動方程式について、ラプラス変換を行います。
$$ F(s) = 2 (X_1(s) – X(s)) $$
$$ 0 = 2 (X(s) – X_1(s)) + 5 (s X(s) – s X_2(s)) $$
$$ 0 = 10 s^2 X_2(s) + 5 (s X_2(s) – s X(s)) + 2 s X_2(s) $$
ラプラス変換を行った式について、各変位について整理します。
$$ F(s) = 2 X_1(s) – 2 X(s) $$
$$ 0 = – 2 X_1(s) + (5 s + 2) X(s) – 5 s X_2(s) $$
$$ 0 = – 5 s X(s) + (10 s^2 + 7 s) X_2(s) $$
この連立方程式を\(X(s)\)について解くことで、伝達関数\(G(s)\)を求めていきます。
伝達関数を求める
先程の連立方程式について、1つ目と3つ目の式から変位\(X_1(s)\)および\(X_2(s)\)と\(X(s)\)との関係を求めます。
$$ X_1(s) = \frac{F(s)+2 X(s)}{2} $$
$$ X_2(s) = \frac{5 s}{10 s^2 + 7 s} X(s)$$
求めた\(X_1(s)\)と\(X_2(s)\)の式を2つ目の式に代入し、入力\(F(s)\)と変位\(X(s)\)の関係を求めていきます。
$$ 0 = – (F(s)+2 X(s)) + (5 s + 2) X(s) – 5 s \frac{5 s}{10 s^2 + 7 s} X(s) $$
$$ F(s) = \left(-2 + 5 s + 2 – 5 s \frac{5 s}{10 s^2 + 7 s}\right) X(s) $$
$$ F(s) = \frac{5 s (10 s^2 + 7 s)- 25 s^2}{10 s^2 + 7 s} X(s) $$
$$ F(s) = \frac{50 s^3 + 10 s^2}{10 s^2 + 7 s} X(s) $$
$$ F(s) = \frac{50 s^2 + 10 s}{10 s + 7} X(s) $$
これより、求めたい伝達関数\(G(s)=\frac{X(s)}{F(s)}\)は、
$$ G(s)= \frac{X(s)}{F(s)} = \frac{10 s + 7}{50 s^2 + 10 s}$$
となることが分かりました。
まとめ
今回は、質量とばねとダンパーが含まれている機械システムについて、伝達関数を求める方法を紹介しました。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
