



前々回、前回の記事に引き続き、ロボットなどのシステムを表した複雑なブロック線図について、簡単化するために必要な知識を紹介していきます。
過去の記事はこちら。

今回は、引き出し点と伝達要素の関係についての知識を、数式を用いながら証明していきます。
伝達要素と引き出し点
伝達要素とは、入力された信号を伝達要素(伝達関数)に応じて出力する特性を持ちます。
引き出し点を用いることで、信号の流れを増やすことが出来ます。
この伝達要素と引き出し点について、ブロック線図の簡単化のために必要となる特性を紹介していきます。
伝達要素を引き出し点の前から後に移動
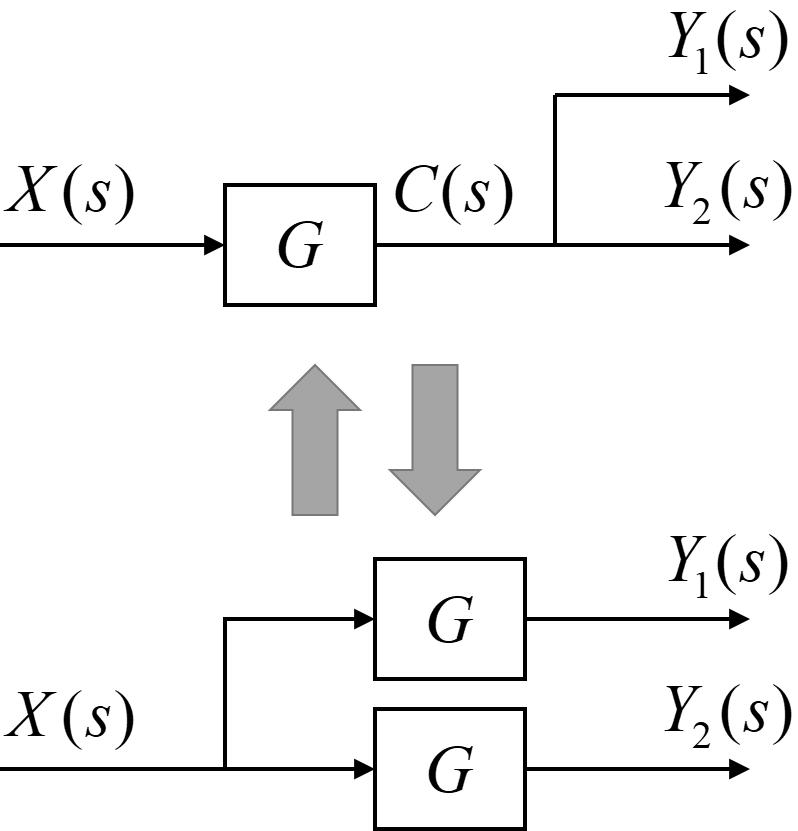
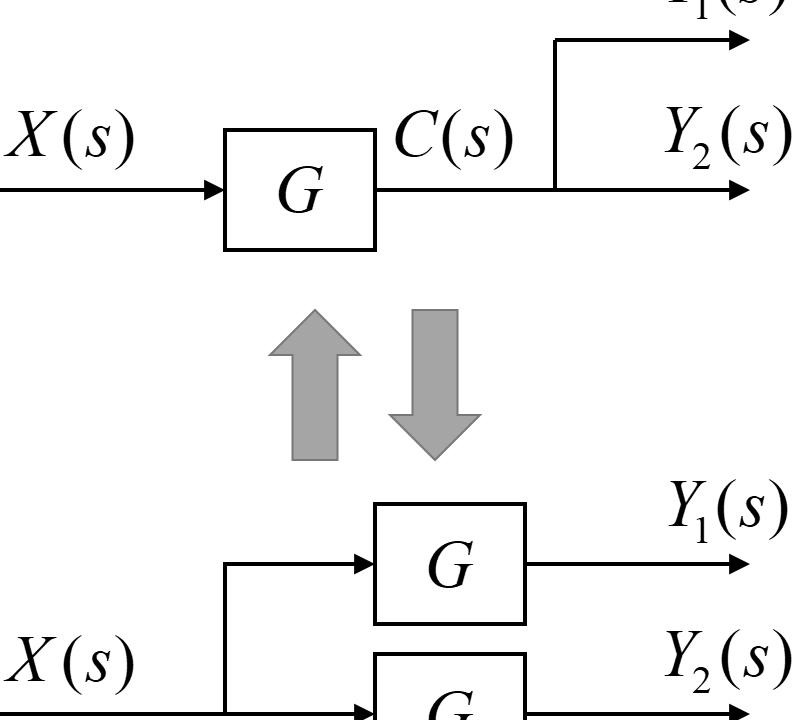
引き出し点の手前にある伝達要素は、引き出し点で引き出された両方の信号に伝達要素を掛けることで、引き出し点の前から後に移動させることが出来ます。
入力信号を\(X(s)\)、2つの出力信号をそれぞれ\(Y_1(s)\)と\(Y_2(s)\)とします。
まず上の図のように、入力信号\(X(s)\)が伝達要素\(G\)を通ってから引き出し点に向かう場合の出力信号\(Y_1(s)\)と\(Y_2(s)\)を考えます。
伝達要素の出力である内部信号\(C(s)\)は、入力信号\(X(s)\)と伝達要素\(G\)を用いて、
$$ C(s) = G X(s) $$
と表すことが出来ます。
出力信号\(Y_1(s)\)と\(Y_2(s)\)は、引き出し点によって両方に内部信号\(C(s)\)が向かうので、
$$ Y_1(s) = C(s) $$
$$ Y_2(s) = C(s) $$
となります。
よって、出力信号(\(Y_1(s)\)と\(Y_2(s)\))と入力信号(\(X(s)\))の関係は、
$$ Y_1(s) = G X(s) $$
$$ Y_2(s) = G X(s) $$
と表すことが出来ます。
つぎに下の図のように、入力信号\(X(s)\)が引き出し点によって引き出された後、各々が伝達要素\(G\)を通って出力信号\(Y_1(s)\)と\(Y_2(s)\)へ向かう場合を考えます。
入力信号\(X(s)\)は引き出し点によって引き出されているため、2つの伝達要素に入力される信号は共に\(X(s)\)になります。
よって、出力信号\(Y_1(s)\)と\(Y_2(s)\)はそれぞれ入力信号\(X(s)\)と伝達要素\(G\)より、
$$ Y_1(s) = G X(s) $$
$$ Y_2(s) = G X(s) $$
と求めることが出来ます。
これより、引き出し点の手前にある伝達要素(上図)と引き出し点の後に移動させた場合(下図)の出力信号は同じになることが分かりました。
伝達要素を引き出し点の後から前に移動
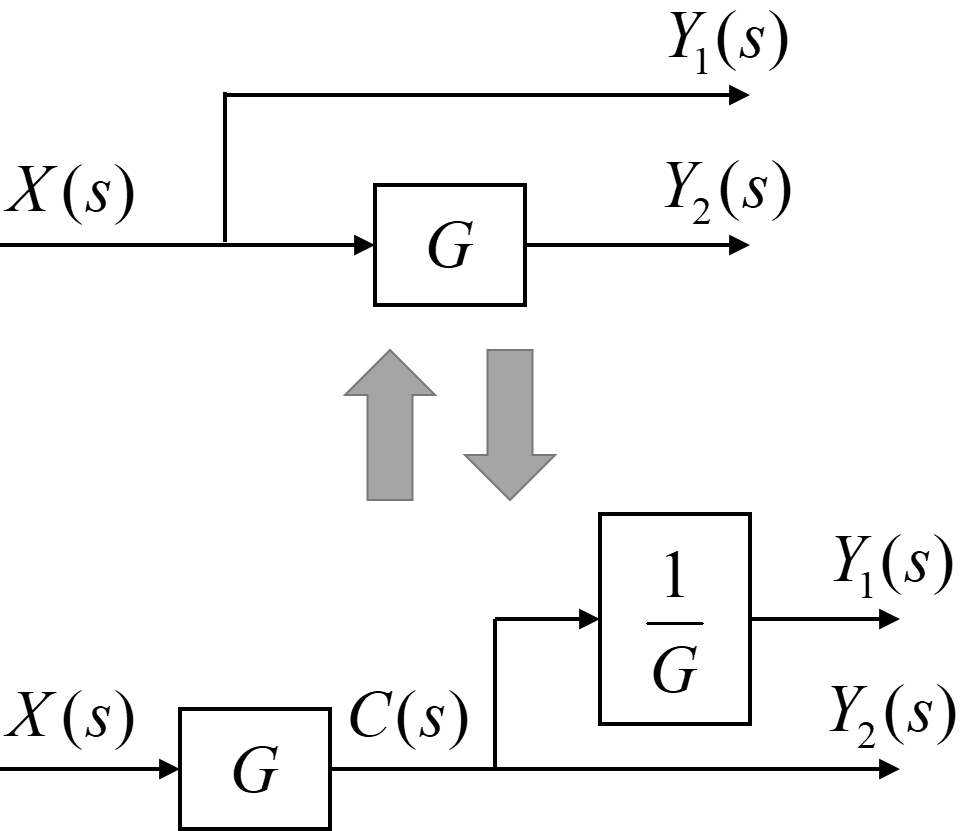
引き出し点の後にある伝達要素は、引き出し点の前に移動し、かつもう一方の引き出された信号に伝達要素の逆数を掛けることで、引き出し点の後から前に移動させることが出来ます。
入力信号を\(X(s)\)、2つの出力信号をそれぞれ\(Y_1(s)\)と\(Y_2(s)\)とします。
まず上の図のように、入力信号\(X(s)\)が引き出し点によって引き出した後、一方はそのまま出力信号\(Y_1(s)\)に、もう一方は伝達要素\(G\)を通って出力信号\(Y_2(s)\)となる場合を考えます。
まず、入力信号\(X(s)\)が引き出し点によって引き出されます。
そして、出力信号\(Y_1(s)\)はそのまま入力信号\(X(s)\)を用いて、
$$ Y_1(s) = X(s) $$
と表すことが出来ます。
出力信号\(Y_2(s)\)は、入力信号\(X(s)\)と伝達要素\(G\)を用いて、
$$ Y_2(s) = G X(s) $$
と表すことが出来ます。
よって、出力信号\(Y_1(s)\)と\(Y_2(s)\)は入力信号\(X(s)\)と伝達要素\(G\)を用いて、
$$ Y_1(s) = X(s) $$
$$ Y_2(s) = G X(s) $$
と求めることが出来ます。
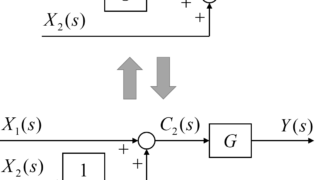
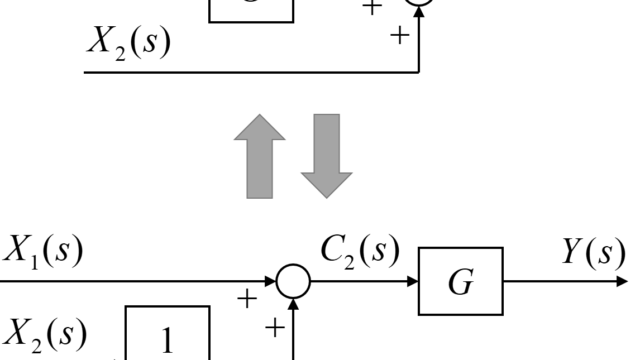
つぎに下の図のように、入力信号\(X(s)\)が伝達要素を通った後に引き出し点によって引き出され、一方は伝達要素の逆数\(\frac{1}{G}\)を通って出力信号\(Y_1(s)\)に、もう一方はそのまま出力信号\(Y_2(s)\)となる場合を考えます。
伝達要素\(G\)の出力である内部信号\(C(s)\)は、入力信号\(X(s)\)と伝達要素\(G\)を用いて、
$$ C(s) = G X(s) $$
と表すことが出来ます。
そして、出力信号\(Y_2(s)\)はそのまま入力信号\(C(s)\)を用いて、
$$ Y_2(s) = C(s) $$
と表すことが出来ます。
出力信号\(Y_1(s)\)は、内部信号\(C(s)\)と伝達要素の逆数\(\frac{1}{G}\)を用いて、
$$ Y_1(s) = \frac{1}{G} C(s) $$
と表すことが出来ます。
よって、出力信号\(Y_1(s)\)と\(Y_2(s)\)は入力信号\(X(s)\)と伝達要素\(G\)を用いて、
$$ Y_1(s) = X(s) $$
$$ Y_2(s) = G X(s) $$
と求めることが出来ます。
これより、引き出し点の後にある伝達要素(上図)と引き出し点の前に移動させた場合(下図)の出力信号は同じになることが分かりました。
まとめ
今回は、複雑なブロック線図を簡単化するために必要な伝達要素と引き出し点の関係についての知識を、数式を用いながら紹介しました。
次回も引き続き、複雑なブロック線図をシンプルに簡単化するために重要なブロック線図の特性を紹介したいと思います。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
