




これまでの記事では、P制御とPD制御そしてPI制御を用いて、制御対象の3次系システムをフィードバック制御する際に、システムの安定性を保つことが出来る各ゲインの範囲を算出する方法を紹介しました。
今回は、同様の3次系フィードバックシステムを安定性を保ちながらPID制御するため、適切な制御ゲインの取りうる範囲を求める方法を紹介していきます。
2次系システムとPID制御による安定性
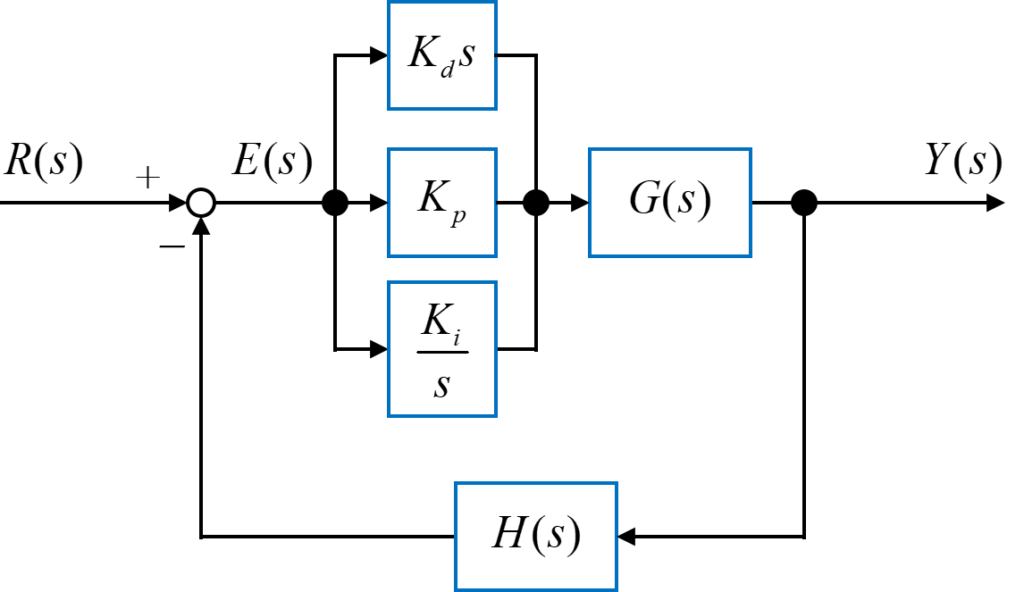
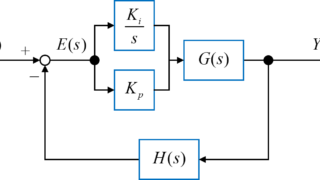
図で示されるようなフィードバックシステムについて、比例ゲイン\(K_p\)と微分ゲイン\(K_d\)と積分ゲイン\(K_i\)を用いたPID制御を考えます。
2次系システムの制御対象\(G(s)\)とフィードバック要素\(H(s)\)を
$$ G(s) = \frac{1}{(s+1)(s+3)} = \frac{1}{s^2 + 4 s + 3}$$
$$ H(s) = 1 $$
として、このフィードバックシステムが安定に動作する制御ゲインの範囲を求めていきます。
この安定な制御対象\(G(s)\)と\(H(s)\)を含むフィードバックシステム全体の伝達関数\(T(s)\)は、
$$ T(s) = \frac{\left(K_p + K_d s + \frac{K_i}{s} \right) G(s)}{1+\left(K_p + K_d s + \frac{K_i}{s} \right)G(s)H(s)} = \frac{\frac{K_p + K_d s + \frac{K_i}{s} }{s^2 + 4 s + 3}}{1 + \frac{K_p + K_d s + \frac{K_i}{s} }{s^2 + 4 s + 3}} $$
$$ = \frac{K_p + K_d s + \frac{K_i}{s}}{s^2 + 4 s + 3+\left(K_p + K_d s + \frac{K_i}{s} \right)} $$
と各ゲイン(比例ゲイン\(K_p\)と微分ゲイン\(K_d\)と積分ゲイン\(K_i\))を用いて表されます。
この伝達関数\(T(s)\)の分母より特性方程式\(D(s)\)を用いると
$$ s^2 + 4 s + 3+\left(K_p + K_d s + \frac{K_i}{s} \right) $$
$$ \Rightarrow D(s) = s^3 + \left( 4 + K_d \right) s^2 + \left( 3 + K_p \right) s + K_i $$
となります。
この特性方程式\(D(s)\)よりラウス配列を作成します。
$$ \begin{eqnarray} \begin{array}{c|ccc} s^3 & 1 & 3 + K_p & 0 \\ s^2 & 4 + K_d & K_i & 0 \\ s^1 & \frac{\left( 4 + K_d \right) \cdot \left( 3 + K_p \right) – 1 \cdot K_i}{4 + K_d} & 0 & \\ s^0 & K_i & & \\ \end{array} \end{eqnarray} $$
作成したラウス配列の第一列より
$$ \left[ 1, 4 + K_d, \frac{\left( 4 + K_d \right) \cdot \left( 3 + K_p \right) – 1 \cdot K_i}{4 + K_d}, K_i \right] $$
という数列を作成します。
この数列の要素について、すべての要素の符号が一致すればシステムは安定になるため、
$$ 4 + K_d > 0 $$
$$ \frac{\left( 4 + K_d \right) \cdot \left( 3 + K_p \right) – 1 \cdot K_i}{4 + K_d} > 0 $$
$$ K_i > 0 $$
であればシステムは安定となります。
1つ目の不等式から、微分ゲインは
$$ 4 + K_d > 0 $$
$$ \Rightarrow K_d > – 4 $$
である必要が分かります。
そして2つ目の不等式から、比例ゲイン\(K_p\)が
$$ \frac{\left( 4 + K_d \right) \cdot \left( 3 + K_p \right) – 1 \cdot K_i}{4 + K_d} > 0 $$
$$ \Rightarrow K_p > \frac{K_i}{4 + K_d} – 3 $$
と微分ゲイン\(K_d\)と積分ゲイン\(K_i\)で表される関係式を満足する必要が分かります。
これより、PID制御の各ゲイン(比例ゲイン\(K_p\)、微分ゲイン\(K_d\)、積分ゲイン\(K_i\))が
$$ K_d > – 4 $$
$$ K_i > 0 $$
$$ K_p > \frac{K_i}{4 + K_d} – 3 $$
であれば、システムは安定であると言えます。
3次系システムとPID制御による安定性
制御対象\(G(s)\)の次数を2次系システムから3次系システムに変更して、PID制御を用いた場合のフィードバックシステムの安定性を確認していきます。
3次系システムに変更した制御対象\(G(s)\)とフィードバック要素\(H(s)\)は
$$ G(s) = \frac{1}{(s+1)(s+2)(s+3)} = \frac{1}{s^3 + 6 s^2 + 11 s + 6}$$
$$ H(s) = 1 $$
とします。
この制御対象\(G(s)\)とフィードバック要素\(H(s)\)を含んだPID制御システム全体の伝達関数\(T(s)\)は、
$$ T(s) = \frac{\left(K_p + K_d s + \frac{K_i}{s} \right) G(s)}{1+\left(K_p + K_d s + \frac{K_i}{s} \right) G(s)H(s)} = \frac{\frac{K_p + K_d s + \frac{K_i}{s}}{s^3 + 6 s^2 + 11 s + 6}}{1 + \frac{K_p + K_d s + \frac{K_i}{s}}{s^3 + 6 s^2 + 11 s + 6}} $$
$$ = \frac{K_p + K_d s + \frac{K_i}{s}}{s^3 + 6 s^2 + 11 s + 6+\left(K_p + K_d s + \frac{K_i}{s}\right) } $$
となります。
このフィードバックシステム全体の伝達関数\(T(s)\)から特性方程式\(D(s)\)を求めて多項式の形に整理すると
$$ D(s) = s^4 + 6 s^3 + \left(11 + K_d \right) s^2 + \left(6+K_p \right) s + K_i $$
と表すことが出来ます。
求めた特性方程式からラウス配列を作成し、システムが安定に動作する各ゲインの範囲を求めます。
$$ \begin{eqnarray} \begin{array}{c|ccc} s^4 & 1 & 11 + K_d & K_i \\ s^3 & 6 & 6+K_p & 0 \\ s^2 & \frac{6 \cdot \left(11+K_d\right)-1 \cdot \left(6+K_p\right)}{6}=\frac{60+6 K_d-K_p}{6} & \frac{6 \cdot K_i – 1 \cdot 0}{6} = K_i & \\ s^1 & \frac{\frac{60+6 K_d-K_p}{6} \cdot \left(6+K_p\right) – 6 \cdot K_i}{\frac{60+6 K_d-K_p}{6}} & & \\ s^0 & K_i & & \\ \end{array} \end{eqnarray} $$
ラウス配列の第一列より
$$ \left[1, 6, \frac{60+6 K_d-K_p}{6}, \frac{\frac{60+6 K_d-K_p}{6} \cdot \left(6+K_p\right) – 6 \cdot K_i}{\frac{60+6 K_d-K_p}{6}}, K_i \right] $$
の数列を抽出します。
この数列内のすべての要素について、符号が一致していればシステムは安定となるため、
$$ \frac{60+6 K_d-K_p}{6} > 0 $$
$$ \frac{\frac{60+6 K_d-K_p}{6} \cdot \left(6+K_p\right) – 6 \cdot K_i}{\frac{60+6 K_d-K_p}{6}} > 0 $$
$$ K_i > 0 $$
のPID制御内の各ゲインが3つの関係式を満たせば、フィードバックシステムは安定性を保たれます。
1つ目の不等式から、比例ゲイン\(K_p\)と微分ゲイン\(K_d\)の関係は
$$ \frac{60+6 K_d-K_p}{6} > 0 $$
$$ \Rightarrow K_p < 6 K_d + 60 $$
と表されます。
また、2つ目の不等式から3つのゲイン(比例ゲイン\(K_p\)と微分ゲイン\(K_d\)と積分ゲイン\(K_i\))の関係が
$$ \frac{\frac{60+6 K_d-K_p}{6} \cdot \left(6+K_p\right) – 6 \cdot K_i}{\frac{60+6 K_d-K_p}{6}} > 0 $$
$$ \Rightarrow \left(60+6 K_d-K_p\right) \cdot \left(6+K_p\right) – 36 \cdot K_i > 0 $$
$$ \Rightarrow {K_p}^2 -54 K_p – 6 K_d K_p – 360 – 36 K_d + 36 K_i < 0 $$
と導かれます。
この導いた関係式から、比例ゲイン\(K_p\)の範囲を他の2つのゲイン(微分ゲイン\(K_d\)と積分ゲイン\(K_i\))を用いて表していきます。
先程の不等式を等式に変更して比例ゲイン\(K_p\)について解くと
$$ {K_p}^2 – \left(54 + 6 K_d\right) K_p – 360 – 36 K_d + 36 K_i = 0 $$
$$ K_p = \frac{54 + 6 K_d \pm \sqrt{{\left(54 + 6 K_d\right)}^2 + 4 \left( 360 + 36 K_d – 36 K_i\right)}}{2} $$
$$ = 27 + 3 K_d \pm \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} $$
と解を求めることが出来ます。
この求めた解から先の比例ゲイン\(K_p\)についての不等式を求めると、
$$ 27 + 3 K_d – \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} < K_p < 27 + 3 K_d + \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} $$
と表すことが出来ます。
よって、3次系システムを制御対象としたPIDフィードバック制御を行った場合について、システムの安定性を保つことが出来るPID制御系の各ゲインの範囲は、
$$ K_i > 0 $$
$$ K_p < 6 K_d + 60 $$
$$ 27 + 3 K_d – \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} < K_p < 27 + 3 K_d + \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} $$
と算出することが出来ました。
さらに計算すると(※付録)
先ほど求めた各ゲインの範囲を表す式について、さらに計算していきます。
通常、PID制御系の各ゲインは虚数ではなく実数で定義されます。
よって、3番目の関係式より、比例ゲインが\(K_p\)が実数で表されるためには、
$$ {\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right) > 0 $$
$$ {\left(9 + K_d\right)}^2 + \left( 40 + 4 K_d – 4 K_i\right) > 0 $$
$$ {K_d}^2 + 22 K_d + 121 – 4 K_i > 0 $$
となる必要があります。
この不等式を解くために、等式に変更して解を求めると、
$$ {K_d}^2 + 22 K_d + 121 – 4 K_i = 0 $$
$$ \Rightarrow K_d = \frac{-22 \pm \sqrt{{22}^2 -4\left( 121 – 4 K_i \right)}}{2} $$
$$ K_d = -11 \pm \sqrt{{11}^2 – \left( 121 – 4 K_i \right)} $$
$$ K_d = -11 \pm 2 \sqrt{K_i} $$
となります。
これより不等式は、
$$ K_d < – 2 \sqrt{K_i} – 11 , K_d > 2 \sqrt{K_i} – 11 $$
$$ \Rightarrow K_d > 2 \sqrt{K_i} – 11 $$
となります。
ここで、積分ゲイン\(K_i\)は常に正(\(+\))の値なので、
$$ 27 + 3 K_d + \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} < 6 K_d + 60 $$
となります。
よって、3次系システムを制御対象としたPIDフィードバック制御を行った場合について、システムの安定性を保つことが出来るPID制御系の各ゲインの範囲は、
$$ K_i > 0 $$
$$ K_d > 2 \sqrt{K_i} – 11 $$
$$ 27 + 3 K_d – \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} < K_p < 27 + 3 K_d + \sqrt{{\left(27 + 3 K_d\right)}^2 + \left( 360 + 36 K_d – 36 K_i\right)} $$
と表すことが出来ます。
まとめ
今回は、PID制御を用いたフィードバック制御系について、フィードバックシステム全体の安定性を保つことが出来る制御ゲイン(比例ゲイン、微分ゲイン、積分ゲイン)の範囲を算出する方法を紹介しました。
制御対象の次数が2次系システムから3次系システムに上がるにつれて、各ゲインの範囲を表す式も複雑になり、3つのゲインの関係をより考慮しないとシステムが不安定となる可能性があることが分かりました。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
