



前回の記事では、P制御を用いて制御対象の3次系システムをフィードバック制御する際に、システムの安定性を保てる制御系内のゲインの範囲を求める方法を紹介しました。
今回は、PD制御を用いた際の各ゲインについて、フィードバックシステムを安定に制御することが出来る範囲を求めていきたいと思います。
2次系システムとPD制御による安定性
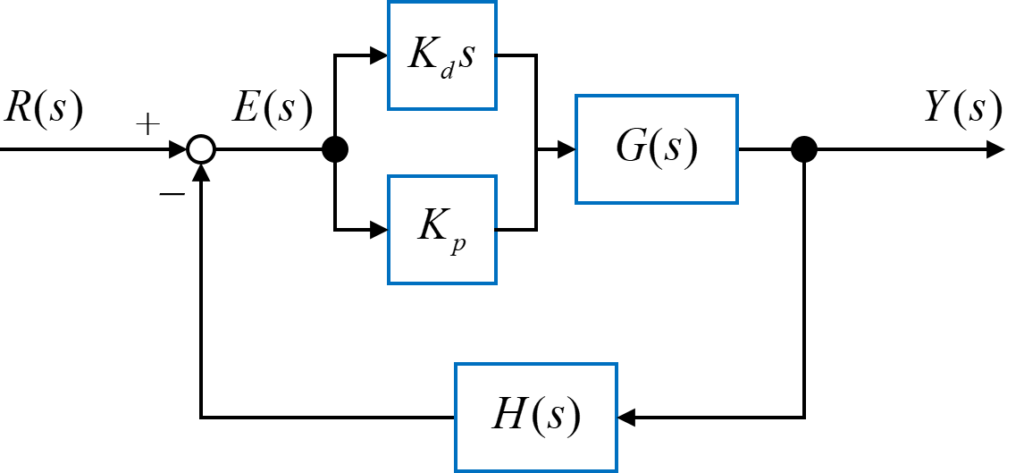
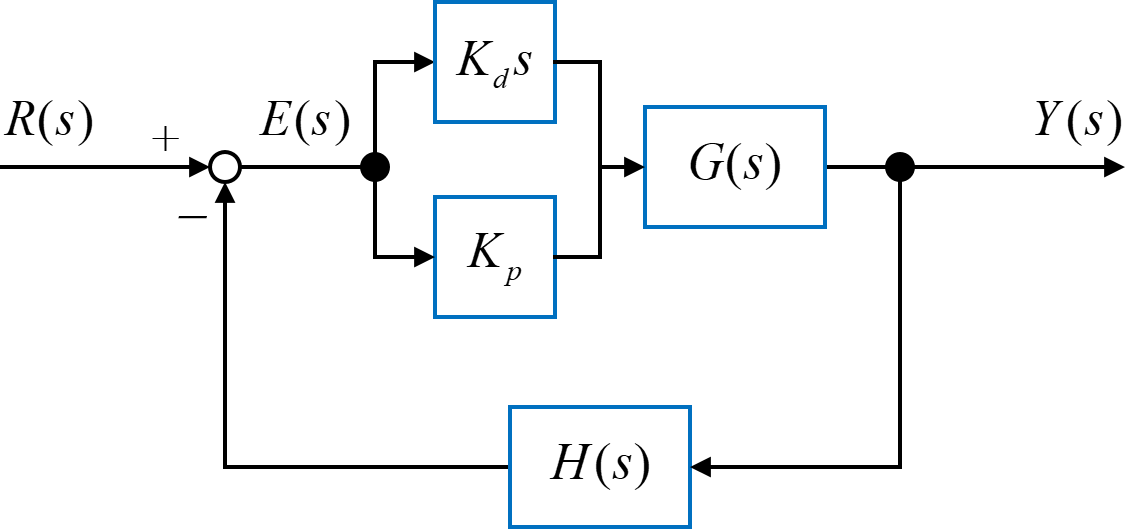
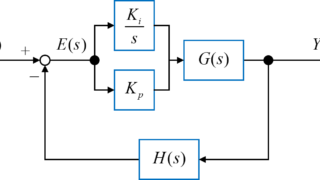
上の図のようなフィードバックシステムについて、比例ゲイン\(K_p\)と微分ゲイン\(K_d\)を用いたPD制御を行います。
まず初めに簡単な制御システムの例として、制御対象\(G(s)\)に2次系システム、フィードバック要素\(H(s)\)を1とした場合のフィードバックシステムが安定に動作する各ゲインの範囲を求めていきたいと思います。
$$ G(s) = \frac{1}{(s+1)(s+3)} = \frac{1}{s^2 + 4 s + 3}$$
$$ H(s) = 1 $$
この安定な制御対象\(G(s)\)を含んだフィードバックシステム全体の伝達関数\(T(s)\)は、
$$ T(s) = \frac{\left(K_p + K_d s \right) G(s)}{1+\left(K_p + K_d s \right)G(s)H(s)} = \frac{\frac{K_p + K_d s }{s^2 + 4 s + 3}}{1 + \frac{K_p + K_d s }{s^2 + 4 s + 3}} $$
$$ = \frac{K_p + K_d s}{s^2 + 4 s + 3+\left(K_p + K_d s \right)} $$
と表すことが出来ます。
この伝達関数\(T(s)\)からラウス配列を作成するために特性方程式\(D(s)\)を求めると
$$ D(s) = s^2 + \left(4 + K_d \right) s + \left(3+K_p \right) $$
となります。
この特性方程式\(D(s)\)からラウス配列を作成すると
$$ \begin{eqnarray} \begin{array}{c|cc} s^2 & 1 & 3+K_p \\ s^1 & 4 + K_d & 0 \\ s^0 & 3+K_p & \\ \end{array} \end{eqnarray} $$
となり、ラウス配列の第一列の要素から
$$ \left[ 1, 4 + K_d , 3+K_p \right] $$
の数列を導くことが出来ます。
この数列内のすべての要素の符号が一致していればシステムは安定であるため、各ゲイン(比例ゲイン\(K_p\)と微分ゲイン\(K_d\))が
$$ 4+K_d > 0 $$
$$ \Rightarrow K_d > -4 $$
$$ 3+K_p > 0 $$
$$ \Rightarrow K_p > -3 $$
であれば、今回用いている2次系のフィードバックシステムは安定性を保つことが出来ます。
詳しい方法については、こちらの記事も参考にしてください。
3次系システムとPD制御による安定性
制御対象\(G(s)\)として2次系システムを用いてPD制御を行った場合、各ゲインによる影響は独立していて、各々を大きくしてもシステムが不安定になる事はありませんでした。
次は、制御対象\(G(s)\)に3次系システムを用いた場合について考えていきます。
対象の制御システムを
$$ G(s) = \frac{1}{(s+1)(s+2)(s+3)} = \frac{1}{s^3 + 6 s^2 + 11 s + 6}$$
$$ H(s) = 1 $$
と次数を1つ増やして3次系のシステムに変更しました。
この3次系システムを用いたフィードバックシステム全体の伝達関数\(T(s)\)は、
$$ T(s) = \frac{\left(K_p + K_d s \right) G(s)}{1+\left(K_p + K_d s \right) G(s)H(s)} = \frac{\frac{K_p + K_d s }{s^3 + 6 s^2 + 11 s + 6}}{1 + \frac{K_p + K_d s}{s^3 + 6 s^2 + 11 s + 6}} $$
$$ = \frac{K_p + K_d s }{s^3 + 6 s^2 + 11 s + 6+\left(K_p + K_d s \right) } $$
と表されます。
この伝達関数\(T(s)\)の分母より得られる特性方程式\(D(s)\)は
$$ D(s) = s^3 + 6 s^2 + \left(11 + K_d \right) s + \left(6+K_p \right) $$
となります。
特性方程式\(D(s)\)を用いてラウス・フルビッツの安定判別法を用いると、
$$ \begin{eqnarray} \begin{array}{c|ccc} s^3 & 1 & 11 + K_d & 0\\ s^2 & 6 & 6+K_p & 0\\ s^1 & \frac{6\cdot\left(11+K_d\right)-1\cdot \left(6+K_p\right)}{6}=\frac{60+6 K_d-K_p}{6} & 0 & \\ s^0 & 6+K_p & & \\ \end{array} \end{eqnarray} $$
とラウス配列を作成することができ、この第一列より
$$ \left[ 1, 6, \frac{60+6 K_d-K_p}{6}, 6+K_p \right] $$
と数列を求める事が出来ました。
この数列内のすべての要素について、符号が一致していればシステムは安定と言えます。
まず、4番目の要素から比例ゲイン\(K_p\)は
$$ 6+K_p > 0 $$
$$ \Rightarrow K_p > -6 $$
である必要があります。
次に、3番目の要素から
$$ \frac{60+6 K_d-K_p}{6} > 0 $$
$$ \Rightarrow K_d > \frac{K_p}{6} – 10 $$
と、微分ゲイン\(K_d\)と比例ゲイン\(K_p\)の関係が導かれます。
よって、今回用いた安定な3次系システムをフィードバックを用いてPD制御する場合、PD制御系内の比例ゲイン\(K_p\)と微分ゲイン\(K_d\)は
$$ K_p > -6 $$
$$ K_d > \frac{K_p}{6} – 10 $$
の関係式を満たす必要があることが分かりました。
ここで、微分ゲイン\(K_d\)が
$$ K_d = 5 $$
というように与えられていた場合、2つ目の不等式から
$$ K_d > \frac{K_p}{6} – 10 $$
$$ \Rightarrow K_p < 6 K_d + 60 $$
$$ \Rightarrow K_p < 90 $$
となり、比例ゲイン\(K_p\)が取りうる範囲は、1つ目の関係式から得られる範囲を加えて
$$ -6 < K_p < 90 $$
となります。
まとめ
今回は、PD制御を用いたフィードバック制御系について、フィードバックシステムの安定性を保てる各ゲイン(比例ゲインと微分ゲイン)の範囲を算出する方法を紹介しました。
制御対象として2次系システムと3次系システムを用いた場合の各ゲインの範囲の比較を行った結果、2次系システムでは各ゲインが独立していたものが、3次系システムになると互いに影響しあうため、両方のゲインの関係を考慮しないとシステムが不安定となる可能性があることが分かりました。
次回は、PI制御を用いて2次系と3次系を用いたフィードバックシステムにおける制御系内の各ゲインについて、各々選択できる範囲を求めていきたいと思います。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
