



スポンサーリンク
世界中の人々を幸せにする をモットーに
楽しい未来を作り・守る ロボット技術 を提供します。
相談・コンサル
ロボット技術の相談やコンサルティングについては、こちらからお問い合わせください。

お問い合わせ技術相談・コンサルのご依頼、記事に対するご意見やご感想、取り扱ってほしいトピック等のご要望など、何でも気軽にお問い合わせください。
...
ロボット技術
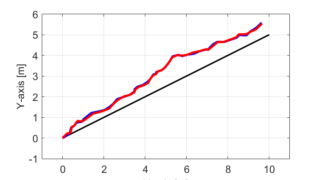
2点間を結ぶ軌跡生成やスムーズな速度プロファイルの生成、そして3次スプライン補間などの軌跡生成手法を紹介しています。
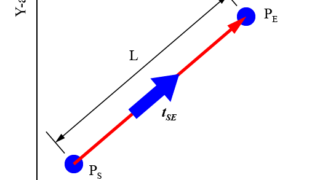
軌跡生成ロボットの軌跡生成(Trajectory Generation)技術についての情報を紹介します。 2点間を結ぶ軌跡生成...
動的システムやフィードバック制御、システムの安定性や可制御性など制御工学を学ぶ上で欠かせない基本知識を紹介しています。

制御工学入門制御工学(Control Engineering)についての情報を紹介します。 動的システムと制御方法
世の中にあふれる動的...
カルマンフィルタによる自己位置推定の基本と線形動的システムへの適用、そして非線形動的システムの自己位置推定に応用するための拡張カルマンフィルタについて紹介しています。
自己位置推定ロボットの自己位置推定(Localization)技術についての情報を紹介します。 カルマンフィルタによる自己位置推定...
根軌跡の基本知識から、根軌跡を書くためのルール、そして詳細な根軌跡を書く方法を紹介しています。
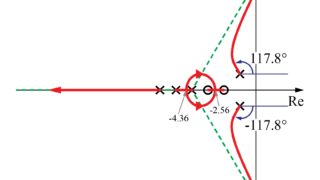
根軌跡根軌跡(Root Locus)についての情報を紹介します。 根軌跡の基本知識
根軌跡を書くためのルール
詳...
ボード線図の基本知識から、各要素のボード線図の書き方、そして実際にボード線図を書く方法を紹介しています。
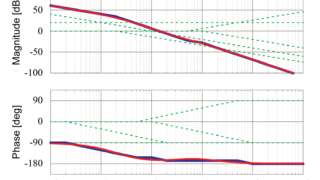
ボード線図入門ボード線図(Bode Plot)についての情報を紹介します。 ボード線図とは
各要素のボード線図の書き方
...
取り扱ってほしいトピック等のご要望があれば、こちらからご連絡をお願いします。
お問い合わせ技術相談・コンサルのご依頼、記事に対するご意見やご感想、取り扱ってほしいトピック等のご要望など、何でも気軽にお問い合わせください。
...
スポンサーリンク
スポンサーリンク




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
