


 ドローン
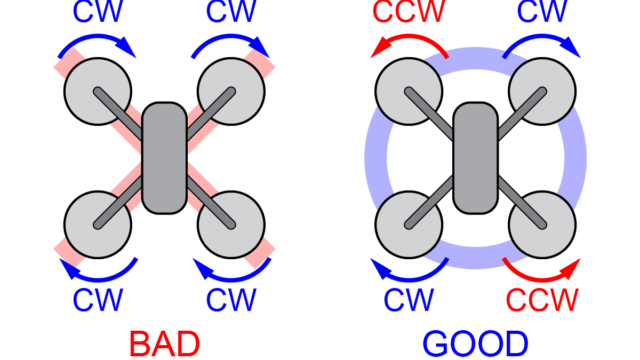
ドローンドローン制御の基礎を学ぼう:ローターと推進力・回転の関係
2019-03-11 tajima Tajima Robotics
ドローンには、アクチュエーターとして複数個のモーター(プロペラ、ローター)が搭載されています。 今回の記事では、マルチコプター …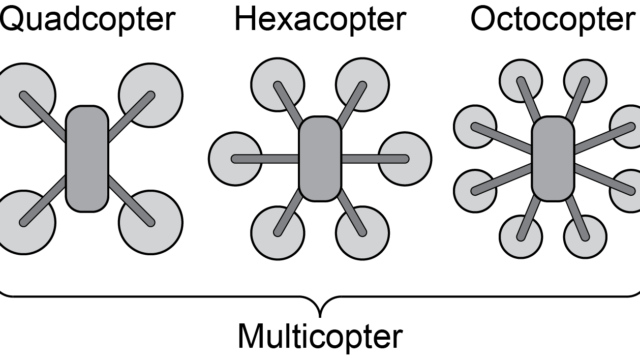 ドローン
ドローンドローンを制御するために仕組みを学ぼう!
2019-03-06 tajima Tajima Robotics
今回の記事では、ドローンとその仕組みについて紹介します。 この記事のポイント ドローンとその種類について
ドローンに搭載されているセンサについて
… ロボット技術
ロボット技術ブロック線図の簡略化を行うコツ:考え方のステップを紹介
2019-02-28 tajima Tajima Robotics
複雑なブロック線図を簡単化して、シンプルなブロック線図に簡略化することで、システムを取り扱いやすく、制御しやすくすることが出来ます。 …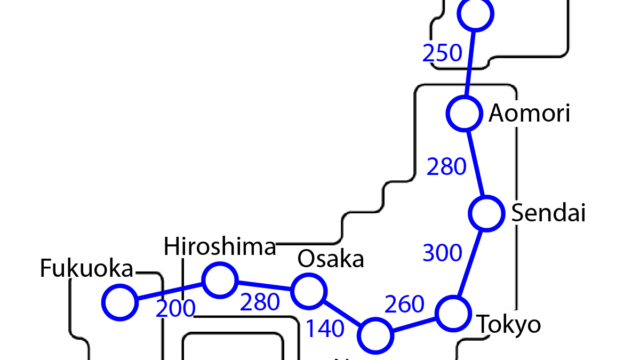 経路探索
経路探索A*アルゴリズムでゴールまでの最短距離を見つける
2019-02-23 tajima Tajima Robotics
今回の記事では、 ロボットや機械を目的地まで最短距離で動かす経路を見つけたい
与えられたマップから、最適なルートを見 …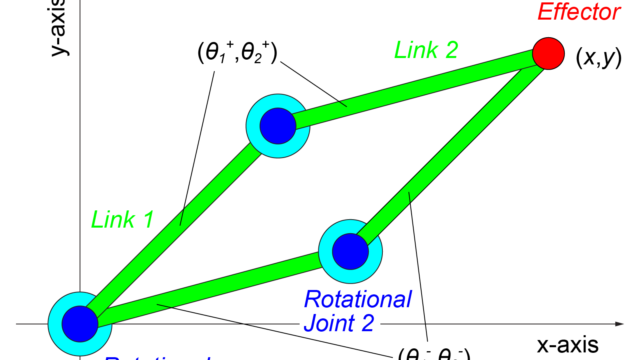 ロボット工学
ロボット工学2リンクモデルの逆運動学を求める!順運動学の式から算出する方法
2019-02-20 tajima Tajima Robotics
ロボット工学において、順運動学や逆運動学を理解することはロボットや機械を制御する際にとても重要です。 以前の記事では、 …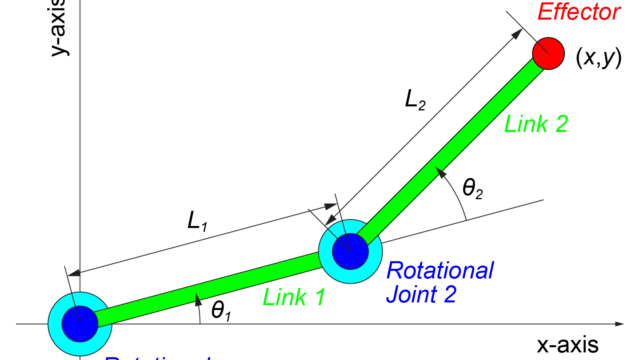 ロボット工学
ロボット工学2リンクモデルの運動学を求めてみよう!簡単に順運動学の式を算出する方法
2019-02-18 tajima Tajima Robotics
ロボット工学を学び、ロボットや機械を制御する際に、順運動学や逆運動学を理解することはとても重要です。 以前の記事では、 …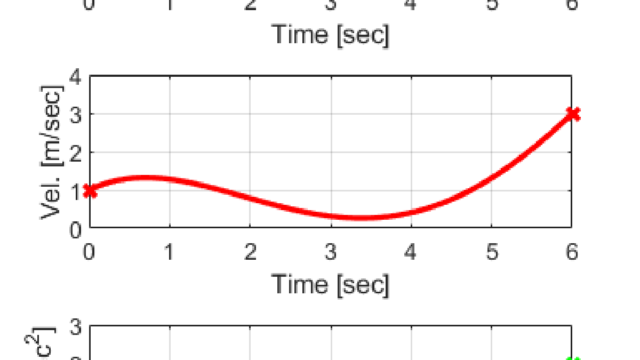 軌跡生成
軌跡生成5次スプライン曲線で離散点を滑らかに補間する方法
2019-02-09 tajima Tajima Robotics
滑らかで連続的な指令を用いることで、ロボットや機械をスムーズに制御することが出来ます。 しかし、ロボットや機械を制御す … 軌跡生成
軌跡生成スプライン曲線のパラメータを行列式で簡単に算出する方法
2019-02-07 tajima Tajima Robotics
スプライン曲線を用いることで離散点を補間することが出来ます。 このスプライン曲線を書くためには、式に含まれる各係数のパ … 軌跡生成5次スプライン曲線で離散点を補間してロボットの軌跡を生成する(2)
2019-02-01 tajima Tajima Robotics
5次スプライン曲線を用いて滑らかな軌跡を生成することで、ロボットや機械を滑らかに制御することが出来ます。 前回の記事で … 軌跡生成5次スプライン曲線で離散点を補間してロボットの軌跡を生成する
2019-01-29 tajima Tajima Robotics
滑らかな指令の軌跡をロボットや機械に与えることで、ロボットや機械を滑らかに制御することが出来ます。 しかし、通常ロボッ …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
