



ドローンには、アクチュエーターとして複数個のモーター(プロペラ、ローター)が搭載されています。
今回の記事では、マルチコプターのアクチュエーターについて紹介します。
この記事のポイント
- マルチコプターのモーターの回転方向
- モーターと推進力、回転(ロール、ピッチ、ヨー)の関係
マルチコプターのアクチュエーター
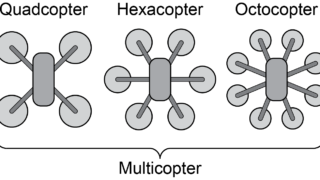
マルチコプターには複数個のモーターが搭載されています。
例えば、クアッドコプターには、その名の通り4つのモーターが搭載されています。
この4つのモーターがアクチュエーターとしてローター(プロペラ)を回すことで、ドローンを動作することが出来ます。
モーターの配置位置
一般的なクアッドコプターのモーターは、機体本体の周りに均等な間隔で配置されています。

他のマルチコプターについても同様で、モーターは均等に本体周りに配置されていることが多いです。
これは、均等にモーターを配置した方が後々に行うドローンの制御が簡単になるという点が1つの理由です。
モーターの回転方向
マルチコプターに搭載されているモーターによるローターの回転方向は、すべて同じ方向ではありません。
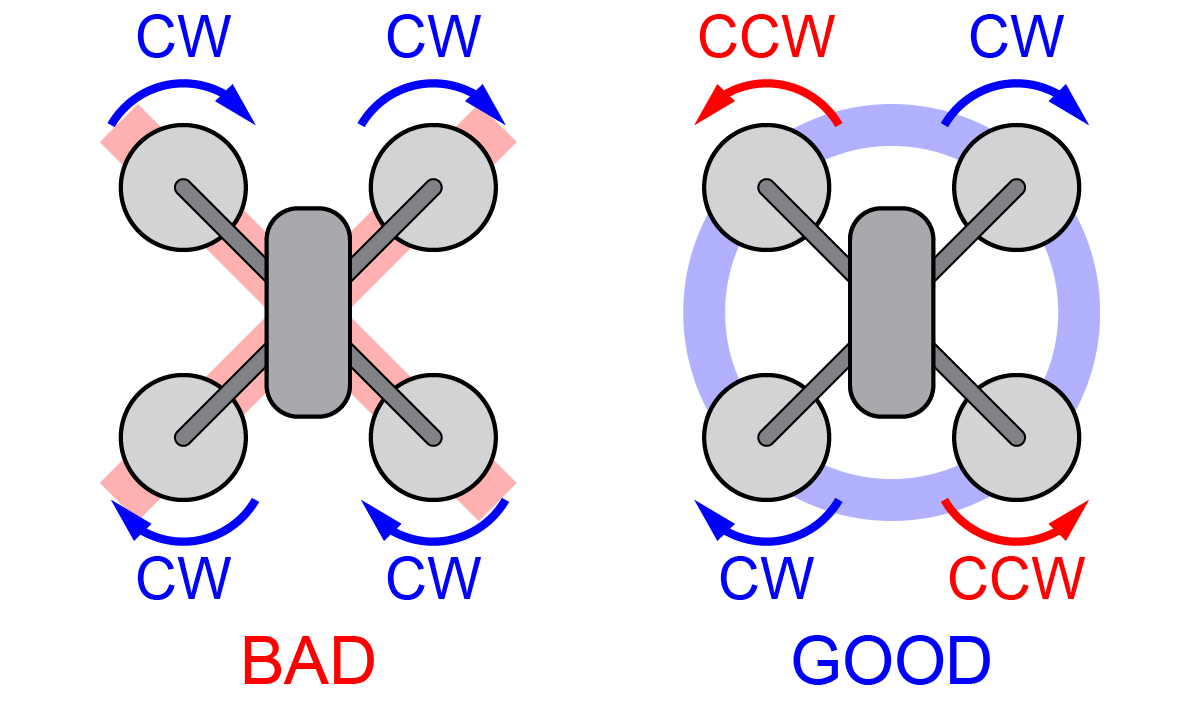
もしモーターの回転方向が同じ場合、ドローンの本体が常に一定方向に回転してしまいます。
そこで、モーターの回転方向は、隣り合ったモータが逆の回転方向になるように配置します。
このようなモーターの回転方向にすることで、推進力や回転(ロール、ピッチ、ヨー)を制御する際に、それぞれ独立して指令を与えることが可能になります。
モーターと力の関係
モーターの出力を上げる(回転数を上げる)ことで、ローターによる押し出す力が大きくなります。
ここでは、ドローン(クアッドコプター)に搭載されているモーターの出力と、その結果起こるドローンの動作(推進力、回転)の関係を紹介します。
推進力
クアッドコプターに搭載されている全てのモーターの出力をコントロールすることで、推進力を制御することが出来ます。
4つのモーターがある同じ回転数で回転しているときに、その力の合計がドローンの総重量と釣り合っている場合、ドローンはその場で制止します。
4つのモーターより生じる推進力とドローンにかかる重力の影響が釣り合うためです。
ここで、4つのモーターの回転数を同時にすべて上げることで、推進力が大きくなり、ドローンは上昇します。
重要な点は、推進力を制御する際にドローンの回転には影響を及ぼさないという点です。
つまり、推進力を独立させて制御することが可能です。
ヨウ軸の回転
ドローンの姿勢(回転)も、モーターの出力をコントロールすることで制御することが出来ます。
Z軸(上下方向)の回転であるヨーについて、ドローン上のモーターの回転方向が互い違いになっていることから、全てのモーターの出力が同じ場合は釣り合って制止します。
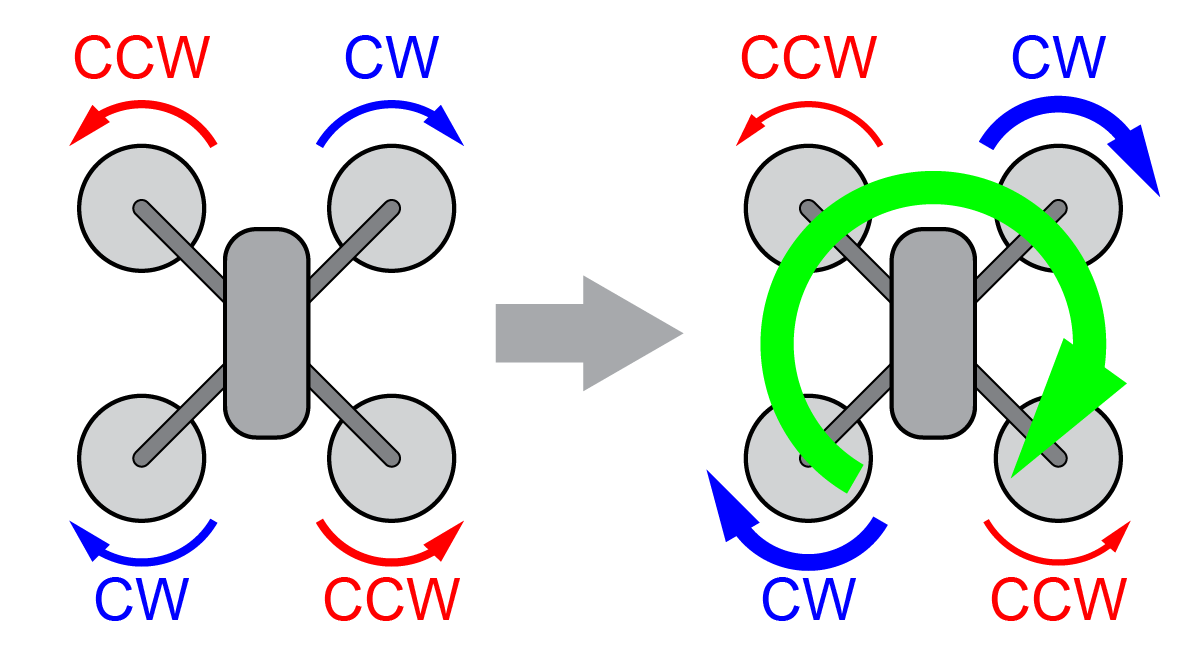
この時に、図のように時計回りのモーターの出力を上げ、反時計回りのモーターの出力を下げることでヨー軸の回転が実現します。
ここで重要な点は、2つのモーターの出力を上げた分だけ、2つのモーターの出力を下げているため、全体の力の総量は同じになります。
よって、ドローンの推進力は変わりません。
また、他の回転方向(ロール軸とピッチ軸)についても、隣り合ったモーターの出力の合計は変化しないため、傾きが発生せずロール軸方向やピッチ軸方向の回転は起こりません。
ロール軸の回転
ヨー軸の回転と同様に、ロール軸(前後方向)の回転についてもモーターの出力をコントロールすることで制御可能です。
図のように右側2つのモーターの出力を上げ、左側2つの出力を下げることで、ドローン本体の姿勢にはロール軸の回転が生じます。
これは、左右での力のバランスが均等でなくなるためです。
ここで重要なポイントは、左右でのバランスは無くなったのですが、前後方向や上下方向のバランスは保たれているという点です。
前後方向についてはそれぞれ出力を上げたモーターと下げたモーターのペアになっているため、均等になっています。
また、時計回りのモーターのペアと反時計回りのモーターのペアについても同様に、出力を上げたモーターと下げたモーターのペアになっているため、均等が保たれています。
よって、ロール軸の回転を制御する際に、他の回転(ピッチ軸、ヨー軸)には影響を及ぼさないということになり、ロール軸の回転を独立して制御することが出来ます。
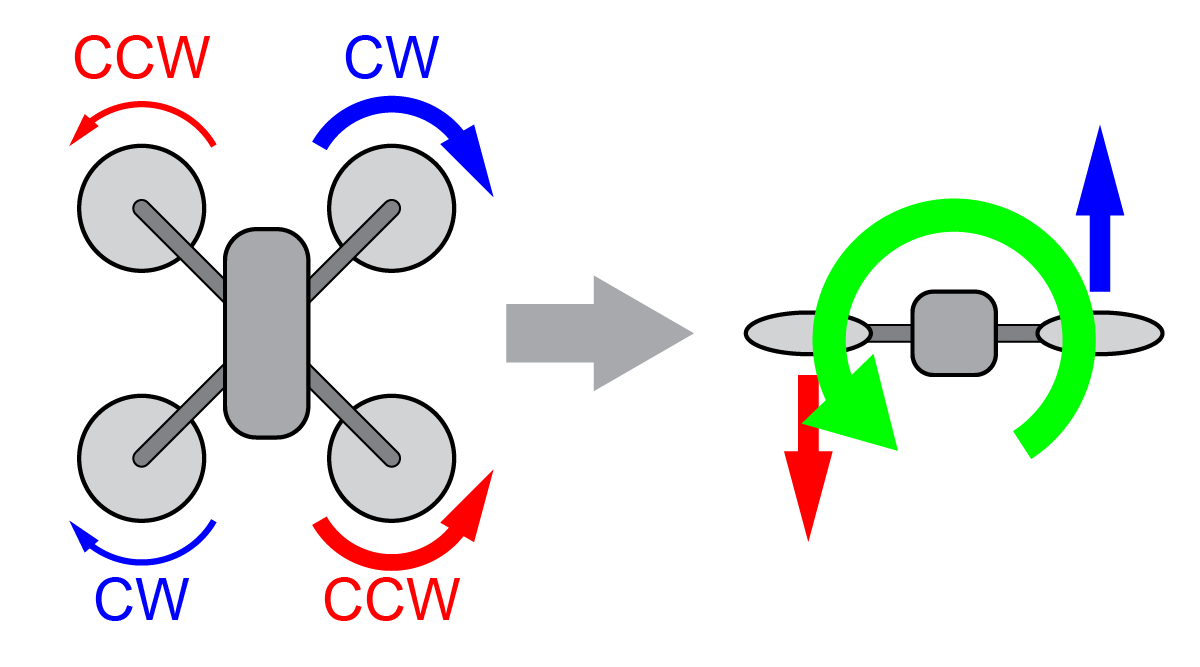
ピッチ軸の回転
ピッチ軸(左右方向)の回転についても、ロール軸の回転と同様にモーターの出力とドローンの姿勢の関係を制御することが出来ます。
ロール軸の回転を制御した場合と同様に、前側2つのモーターの出力を上げ、後側2つの出力を下げることで、ドローン本体の姿勢にはピッチ軸の回転が生じます。
これは、前後でのモーターによる力がアンバランス(不均等)になるためです。
ここでも、ピッチ軸の回転を制御するときに、他のロール軸やヨー軸の回転には影響を及ぼさないという点が重要です。
これは、モーターの出力の変化により前後での均等は崩れたのですが、左右方向や上下方向のモーターによる力は均等に保たれているためです。
これにより、ピッチ軸の回転を制御する際に、他の回転(ロール軸、ヨー軸)には影響を及ぼさずに、ピッチ軸の回転を独立させて制御可能になります。
まとめ
今回の記事では、マルチコプターの1つであるクアッドコプターについてアクチュエーターについて紹介しました。
紹介したマルチコプターに搭載されているモーターの回転方向や、それによるモーターの出力と推進力、回転(ロール、ピッチ、ヨー)の関係を用いることで、ドローンの制御則を導くことが出来ます。
他のマルチコプターについても同様の考え方を用いることで、アクチュエーターとドローンの状態の関係を考えることが出来ます。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
