



 制御工学
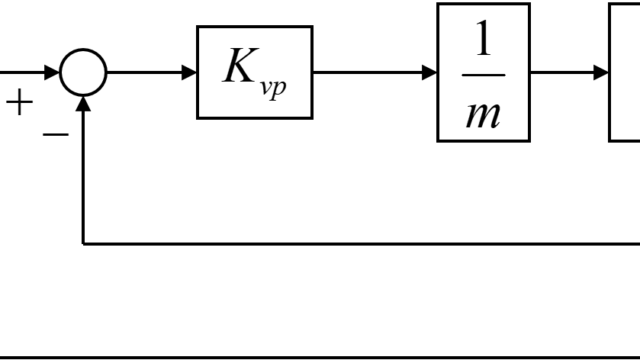
制御工学カスケード型制御系の基本と利点
2019-10-22 tajima Tajima Robotics
ロボットや工作機械を、望む目標値通りに動かすためには、制御装置がとても重要です。 今回の記事では、工作機械やロボットの位置決め・送り制御に広く用いられているカスケード … 軌跡生成
軌跡生成N次スプライン曲線のプログラムの書き方
2019-09-28 tajima Tajima Robotics
スプライン曲線を用いることで、離散点を滑らかなに結ぶことが出来ます。 以前の記事では、4つの離散点を3次スプライン曲線を用いて結ぶプログラムを紹介しました。
… ドローン
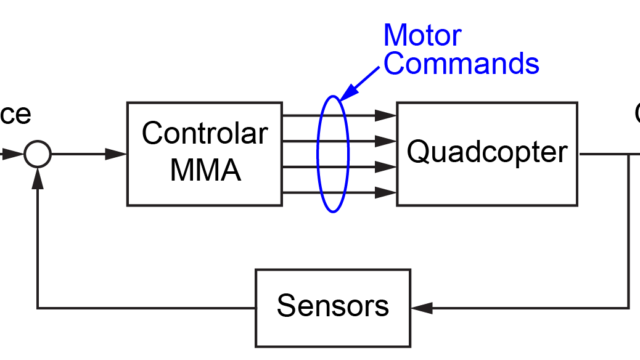
ドローンドローンに搭載されてるセンサーの紹介
2019-08-18 tajima Tajima Robotics
一般的なドローンには、4つのセンサーが搭載されています。 今回の記事では、これら4つのセンサーのついて紹介します。 この記事のポイント ドロー … ロボット技術超高齢化社会の問題とロボット技術への期待
2019-07-22 tajima Tajima Robotics
超高齢化社会となった日本において、労働力不足の問題はとても深刻です。 なぜなら少子高齢化が進むことで、働ける人数が不足するためです。 今回の記事では、超高齢化社 …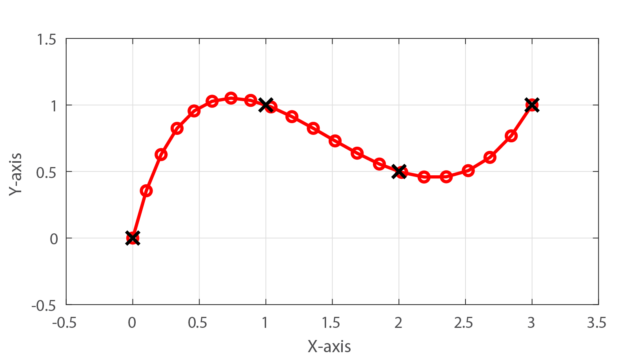 軌跡生成
軌跡生成3次スプライン曲線のプログラムの書き方を紹介
2019-06-29 tajima Tajima Robotics
与えられた離散点を滑らかなに結ぶ方法として、スプライン曲線を用いた手法があります。 以前の記事では、3次スプライン曲線を用いることで、4つの離散点を補間出来る … ロボット技術N次スプライン曲線でN+1個の離散点を滑らかに補間する方法
2019-05-22 tajima Tajima Robotics
N次のスプラインを用いることで、N+1個の離散的な点を通る滑らかな軌跡を、曲線近似により生成することが出来ます。 今回 … 軌跡生成
軌跡生成実際に3次スプライン曲線で離散的な指令点を補間してみよう!
2019-04-09 tajima Tajima Robotics
スプライン曲線を用いることで、離散点を滑らかに補間することが可能になります。 今回の記事では、3次スプラインを使った4 … ロボット技術4つの制御点を通る3次スプライン曲線の描き方
2019-03-28 tajima Tajima Robotics
4つの離散点(制御点)を通る滑らかな曲線を、3次スプライン曲線による近似を用いて生成する方法を紹介します。 今回の記事では、位置の制約条件のみを取り扱います。 …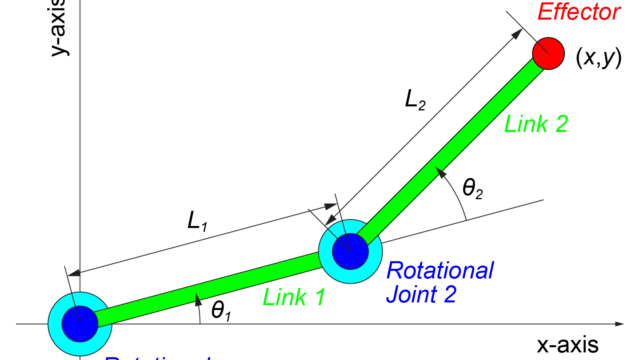 ロボット工学
ロボット工学2リンクモデルのヤコビ行列を算出する方法
2019-03-17 tajima Tajima Robotics
ヤコビ行列を用いることで、ロボットの「関節の速度」と「手先の速度」の関係を示すことが出来ます。 https://tajimarobotics.com/jacobian … ドローンドローンをフィードバック制御するための基本知識を学ぼう!
2019-03-14 tajima Tajima Robotics
ドローン(クアッドコプター)のフィードバック制御について、基本的な流れと知識を紹介します。 この記事のポイント …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
