



ロボットや工作機械を、望む目標値通りに動かすためには、制御装置がとても重要です。
今回の記事では、工作機械やロボットの位置決め・送り制御に広く用いられているカスケード型制御系についての基本や利点および欠点について紹介します。
カスケード型制御系とは
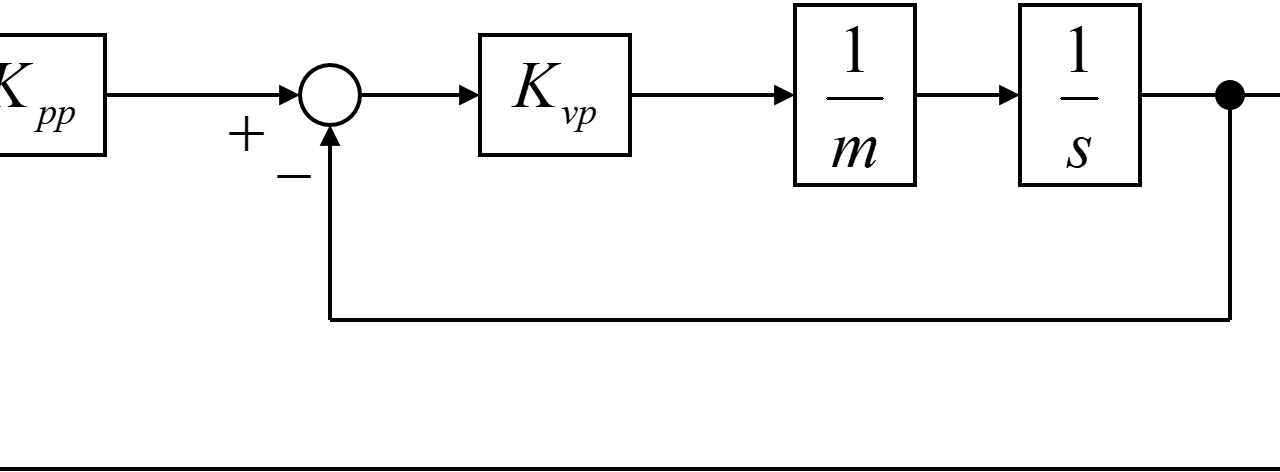
カスケード型制御系とは、下記のブロック線図のように1つのフィードバックループの内側に、もう1つのフィードバックループが存在する制御系です。
このブロック線図では、カスケード型制御系で質量mを制御しています。
カスケード(Cascade)という英単語の意味は、「連続した」や「縦つなぎ」です。
このカスケードが意味する通り、フィードバックループが連続している制御系のことをカスケード制御系と言います。
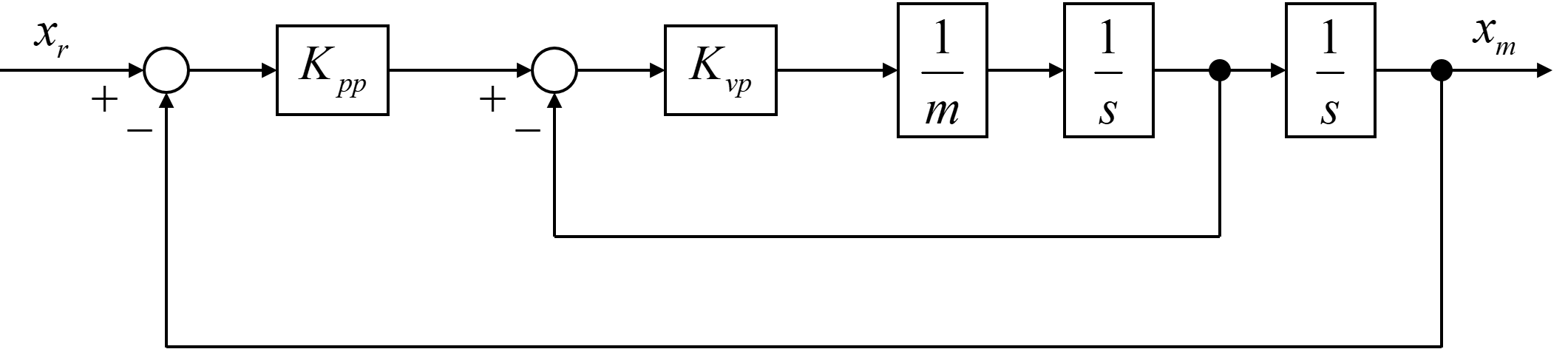
上図のように、カスケード型制御系を構成する2つのフィードバックループについて、
- 外側のフィードバックループをメジャーループ
- 内側のフィードバックループをマイナール-プ
と言います。
カスケード型制御系の利点
カスケード制御系には、次のような利点があります。
まず、内側のマイナーループの応答性を高めることにより、制御系全体の性能を向上することが出来ます。
次に、それぞれのフィードバックループで異なる制御周期を使用することが出来ます。
その結果、制御装置のリソースを十分に使うことが可能になります。
また、それぞれのフィードバックループは、シンプルなフィードバック制御系の形をしています。
そのため、制御系の解析が容易になるという利点があります。
このように、カスケード型制御系には多くの利点があり、工作機械を中心に広く用いられています。
カスケード型制御系の欠点
先にカスケード型制御系の利点を紹介しましたが、欠点も紹介しておきます。
まずカスケード型制御系では、取り扱う制御系全体をメジャーループの中にマイナーループという決まった型にしています。
そのため、制御系としての最適性を追い求めることが難しくなります。
また、ロボットや工作機械などの制御対象が複雑化することにより、カスケード型制御系に含まれる制御パラメータの調整が難しくなるという欠点もあります。
上記のように、カスケード型制御系は万能という訳ではありません。
しかし、多くの位置決め制御や送り制御に用いられていることから、仕組みを理解しておくことは重要ではと思います。
まとめ
今回は、カスケード型制御系について、利点や欠点を含めて紹介しました。
次回の記事では、カスケード型制御系の基本構成について、ブロック線図や伝達関数を使いながら紹介します。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
