



 ロボット工学
ロボット工学線形時不変システム(LTIシステム)を理解する
2017-12-06 tajima Tajima Robotics
今回は、線形時不変システム(LTIシステム、Linear Time Invariant System)を説明したいと思います。
… ロボット工学静的システムと動的システムの違いは? 因果的・非因果的って何?
2017-12-05 tajima Tajima Robotics
ロボットのような制御対象となるシステムには、静的システムと動的システムがあります。 この二つのシステムの違いについて説明したい …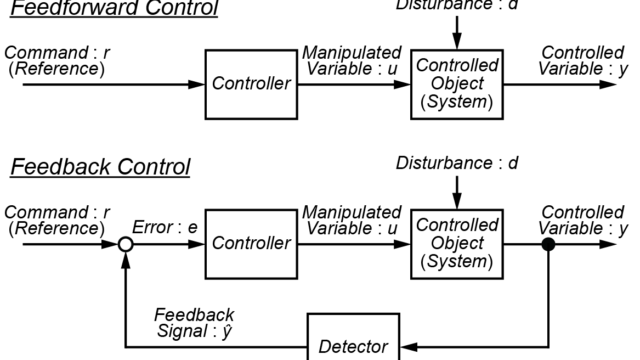 ロボット工学
ロボット工学フィードフォワード制御とフィードバック制御でロボットを自由に制御しよう
2017-12-04 tajima Tajima Robotics
ロボットなどを思い通りに動かすために、フィードフォワード制御とフィードバック制御があります。 この二つの制御方法は、
… ロボット工学
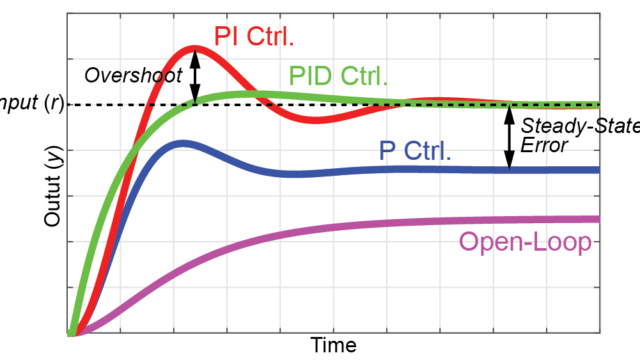
ロボット工学制御工学の基本 PID制御をマスターしてロボットを動かそう
2017-12-03 tajima Tajima Robotics
PID制御とはフィードバックを用いた古典制御の中の一つです。 その名の通り、現在の出力値\(y\)について目標値\(r …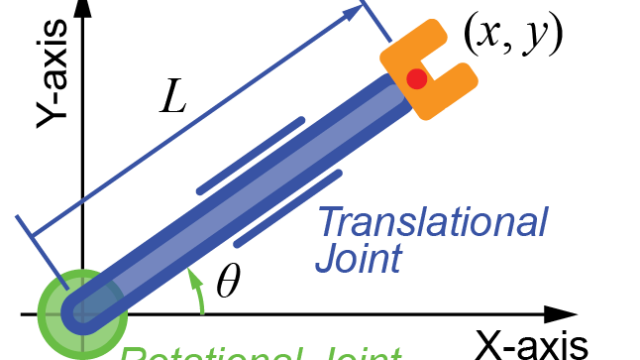 ロボット工学
ロボット工学ヤコビ行列を使ってロボットの運動を計算する
2017-12-02 tajima Tajima Robotics
今回はヤコビ行列について説明したいと思います。 ヤコビ行列を使うことで、ロボットの「関節の速度」と「手先の速度」の関係を示すことが出来ます。 ヤコビ … ロボット工学
ロボット工学車輪ロボット(対向2輪型)の運動を計算してみよう
2017-12-02 tajima Tajima Robotics
今回は車輪ロボットとして対向2輪型ロボットの運動を取り扱いたいと思います。 車輪ロボットの中でもシンプルな構造なので、移動ロボ … ロボット工学ロボット工学の基礎 順運動学と逆運動学を理解する
2017-11-30 tajima Tajima Robotics
ロボット工学を学ぶうえで必要な基本、 『順運動学』と『逆運動学』について解説してきます。 運動学の定義
運動学とは … ロボット技術SLAM(Simultaneous Localization And Mapping)とは
2017-11-29 tajima Tajima Robotics
自動運転技術やお掃除ロボットにも使用されているSLAM (Simultaneous Localization And Mapping) をシ … ロボット技術『基本の理論』から『流行りの最新技術』まで分かりやすく紹介
2017-11-25 tajima Tajima Robotics
なるべく分かりやすく図や例を用いて紹介していきます! …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
