



本シリーズでは、制御工学で学ぶ基本的な知識から実際の応用例までを、なるべく分かりやすく解説しています。

前回の記事では、常微分方程式で表された連続時間での線形システムの安定性を確認する方法を紹介しました。
しかし、この世の中には連続的なシステムのみではなく、たくさんの離散的なシステムが存在します。
今回の記事では、この離散時間での線形システムの安定性を確認する方法を紹介していきたいと思います。
離散時間システムの状態方程式
前回の記事で取り扱った常微分方程式
$$ \dot{\boldsymbol{ x }} = \boldsymbol{ A } \boldsymbol{ x } $$
は連続時間の線形システムの状態方程式を表しています。
しかし、世の中のシステムには離散的な時間で表された離散的システムが多く存在します。
これら離散時間システムの状態方程式は
$$ \boldsymbol{ x }(k+1) = \boldsymbol{ \tilde{A} } \boldsymbol{ x }(k) $$
と表すことが出来ます。
ここで、xkはサンプルk番目の状態xを表していて
$$ \boldsymbol{ x }(k) = \boldsymbol{ x }(k \Delta t) $$
のようにサンプル時間Δtを用いて表されます。
そして、離散時間システムの状態方程式に含まれる\(\boldsymbol{ \tilde{A} }\)は連続時間システムの状態方程式に含まれる行列Aを用いて
$$ \boldsymbol{ \tilde{A} } = e^{\boldsymbol{ A } \Delta t} $$
という式で求められます。
今回は、この離散的な時間で表された線形システムについて安定性を確認していきます。
離散時間システムの安定性
離散的な線形システムの安定性を確認する方法を紹介していきます。
まず、システムに与えられるサンプリング時間k=0での初期値をx0と設定します。
このとき、サンプリング時間k=1での状態x1は、離散的な線形システムの状態方程式を用いて
$$ \boldsymbol{ x_1 } = \boldsymbol{ \tilde{A} } \boldsymbol{ x_0 } $$
と求めることが出来ます。
そして、サンプリング時間k=2での状態x2は、状態x1と状態方程式を用いて
$$ \begin{eqnarray} \boldsymbol{ x_2 } &=& \boldsymbol{ \tilde{A} } \boldsymbol{ x_1 } \\ &=& \boldsymbol{ \tilde{A} } \boldsymbol{ \tilde{A} } \boldsymbol{ x_0 } \\ &=& {\boldsymbol{ \tilde{A} }}^2 \boldsymbol{ x_0 } \end{eqnarray} $$
となります。
同様に、サンプリング時間k=3での状態x3は
$$ \begin{eqnarray} \boldsymbol{ x_3 } &=& \boldsymbol{ \tilde{A} } \boldsymbol{ x_2 } \\ &=& \boldsymbol{ \tilde{A} } {\boldsymbol{ \tilde{A} }}^2 \boldsymbol{ x_0 } \\ &=& {\boldsymbol{ \tilde{A} }}^3 \boldsymbol{ x_0 } \end{eqnarray} $$
と算出できます。
よって、サンプリング時間k=nでの状態xnは
$$ \boldsymbol{ x_n } = {\boldsymbol{ \tilde{A} }}^n \boldsymbol{ x_0 } $$
と表すことが出来ます。
このxnについて式からも分かるように、初期状態x0が与えられた場合に\(\boldsymbol{ \tilde{A} }\)を用いることで、未来の値を求めることが出来ます。
ここで、\(\boldsymbol{ \tilde{A} }\)の固有値λとすると
$$ \begin{eqnarray} \begin{array}{ll} \boldsymbol{ x_1 } = \boldsymbol{ \tilde{A} } \boldsymbol{ x_0 } & \lambda \\ \boldsymbol{ x_2 } = {\boldsymbol{ \tilde{A} }}^2 \boldsymbol{ x_0 } & {\lambda}^2 \\ \boldsymbol{ x_3 } = {\boldsymbol{ \tilde{A} }}^3 \boldsymbol{ x_0 } & {\lambda}^3 \\ \boldsymbol{ x_n } = {\boldsymbol{ \tilde{A} }}^n \boldsymbol{ x_0 } & {\lambda}^n \\ \end{array} \end{eqnarray} $$
という関係性が導かれます。
(詳しくは記事下部のおまけを参照してください。)
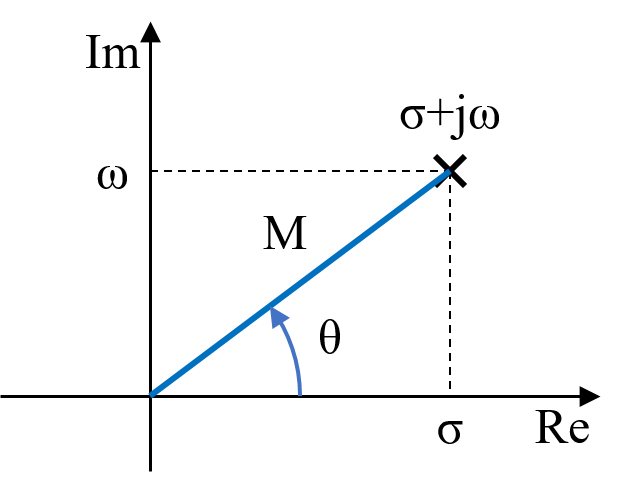
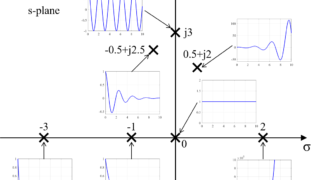
ここで、固有値λは常に上の図のように実部σと虚部ωで表されます。
この固有値λの大きさをR、角度をθとすると固有値λは
$$ \lambda = R e^{i \theta} $$
のように書き換えることが出来ます。
そして、状態xnに対するλnは
$$ {\lambda}^n = R^n e^{i n \theta} $$
と表すことが出来ます。
この式で、einθは回転(角度)のみを表しており、大きさには影響はありません。
よって、Rが1より大きいければλnは無限大に発散し、Rが1より小さければ0に収束することが分かります。
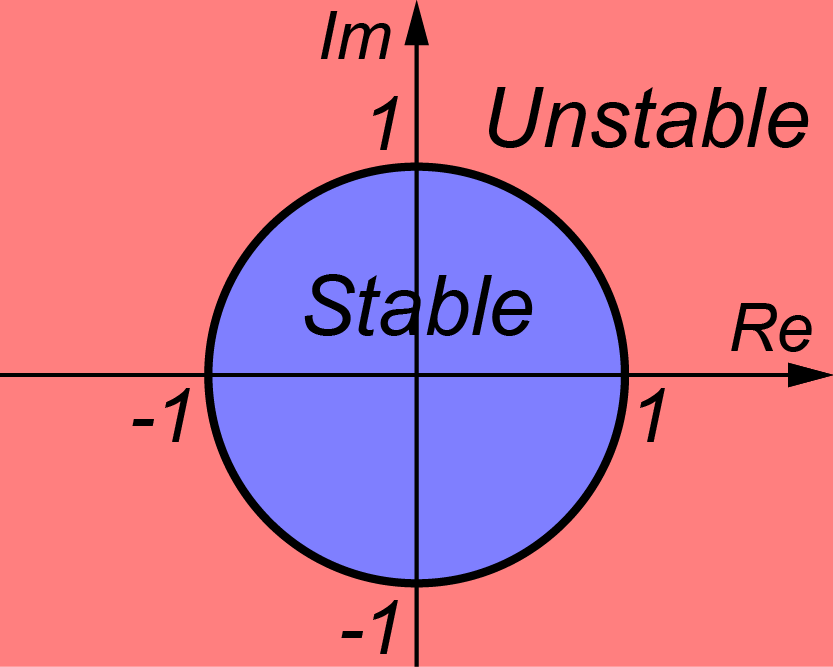
ここで、長さが1の単位円を書きます。
この円の中に固有値λが存在するとシステムは安定となります。
言い換えると、固有値λが円の外に存在した場合、システムは不安定になります。
おまけ
以前のシリーズ記事でも紹介した通り、連続時間システムの場合
$$ \begin{eqnarray} \begin{array}{l} \boldsymbol{ A } \boldsymbol{ T } = \boldsymbol{ T } \boldsymbol{ D } \\ \Rightarrow \boldsymbol{ A } = \boldsymbol{ T } \boldsymbol{ D } {\boldsymbol{ T }}^{-1} \end{array} \end{eqnarray} $$
という関係性が成り立ちます。
離散時間システムでも同様で
$$ \begin{eqnarray} \begin{array}{l} \boldsymbol{ \tilde{A} } \boldsymbol{ \tilde{T} } = \boldsymbol{ \tilde{T} } \boldsymbol{ \tilde{D} } \\ \Rightarrow \boldsymbol{ \tilde{A} } = \boldsymbol{ \tilde{T} } \boldsymbol{ \tilde{D} } {\boldsymbol{ \tilde{T} }}^{-1} \end{array} \end{eqnarray} $$
という関係性が成り立ちます。
まとめ
今回は、離散的な時間でのシステムが与えられた場合に、システムの安定性を固有値・固有ベクトルを使って確認する方法を紹介しました。
覚えておいてほしい大事なことは、連続時間システムの場合でも離散時間システムの場合でも、システムの安定性は固有値を確認することで分かるということです。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+

固有値が単位円上に存在したらどうなるのでしょうか.
お時間があれば教えてください.
コメントありがとうございます。
固有値が単位円上に存在する場合、システムは安定限界という状態になります。
システムが安定限界の場合は、発生した振動はそのままの振動(振幅)を持続します。
安定状態のように振動が減衰はしないが、不安定状態のように無限大に発散もしないという状態です。
参考になれば幸いです。