



今回は、算出した運動方程式から実際にシステムの運動を求めていきます。
運動方程式の算出方法については、こちらの記事を参考にしてください。
運動方程式を解いてシステムの運動を求める
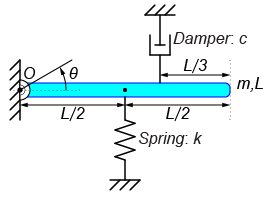
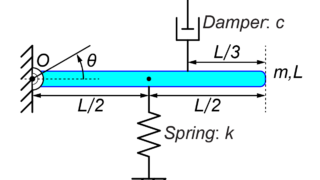
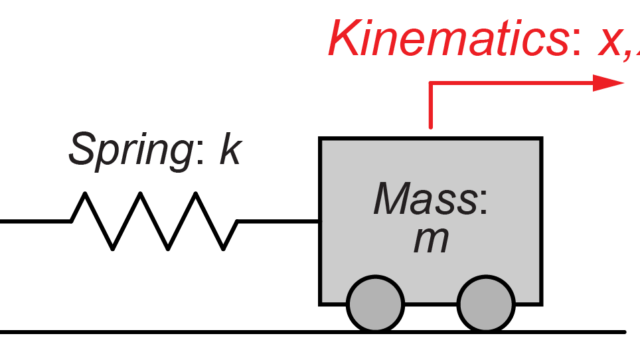
前回に引き続き、図の様なモデルを用いてシステムの運動を求めていきます。
このシステムの運動方程式は、
$$ \frac{1}{3} m L^2 \ddot{\theta} + \frac{4}{9} c L^2 \dot{\theta} + \frac{1}{4} k L^2 \theta = 0 $$
と表すことが出来ます。
この線形微分方程式を\(\theta\)について解くことで、システムの運動を算出します。
このような2階線形微分方程式の解\(\theta(t)\)は
$$ \theta(t) = C_1 e^{\lambda_1 t} + C_2 e^{\lambda_2 t} $$
となることが一般的に分かっています。
この時の\(\lambda_1\)と\(\lambda_2\)の値によって、システムの運動は、
- 加減衰システム(Overdamped System)
- 臨界減衰システム(Critically Damped System)
- 不足減衰システム(Underdamped System)
の3種類の運動に分類することが出来ます。
詳細は、こちらの記事を参考にしてください。

実際にシステムの運動を求める
今回のモデルについて、棒の質量が\(m=1[kg]\)で長さが\(L=1[m]\)、そしてばね定数を\(k=10[N/m]\)とした時、
ケース1 ダンパー\(c=10[N/(m/s)]\)
ケース2 ダンパー\(c=4.1079[N/(m/s)]\)
ケース3 ダンパー\(c=1[N/(m/s)]\)
の各ダンパー定数の場合に、棒を時刻t=0で\(\theta_0=1[rad]\)で静かに離した時の運動を求めます。
ケース1: ダンパー\(c=10[N/(m/s)]\)
今回の運動方程式、
$$ \frac{1}{3} m L^2 \ddot{\theta} + \frac{4}{9} c L^2 \dot{\theta} + \frac{1}{4} k L^2 \theta = 0 $$
について、
$$ M = \frac{1}{3} m L^2 $$
$$ C = \frac{4}{9} c L^2 $$
$$ K = \frac{1}{4} k L^2 $$
と置くと、
$$ M \ddot{\theta} + C \dot{\theta} + K \theta = 0 $$
と\(\theta\)についての2階線形微分方程式の形で表すことが出来ます。
この線形微分方程式について、\(\lambda\)を求めると、
$$ \lambda = – \frac{C}{2 M} \pm \frac{1}{2} \sqrt{\left( \frac{C}{M} \right)^2 – \frac{4 K}{M} } $$
となります。
これにケース1での各パラメータを入力すると、
$$ \lambda_1 = -0.5885 $$
$$ \lambda_2 = -12.7449 $$
となり、2つの異なる実数になることが分かります。
よって、このシステムの運動は、
$$ \theta(t) = C_1 e^{-0.5885 t} + C_2 e^{-12.7449 t}$$
となります。
この式と時刻\(t=0\)での初期条件\(\theta(0)=\theta_0=1\)と\(\dot{\theta}(0)=0\)を用いて、\(C_1\)と\(C_2\)を求めます。
時刻\(t=0\)で\(\theta(0)=1\)なので、
$$ \theta(0) = C_1 e^{0} + C_2 e^{0} = 1 $$
$$ \Rightarrow C_1 + C_2 = 1 $$
の関係式が得られます。
次に、時刻\(t=0\)で\(\dot{\theta}(0)=0\)なので、
$$ \dot{\theta}(t) = -0.5885 C_1 e^{-0.5885 t} + -12.7449 C_2 e^{-12.7449 t}$$
$$ \Rightarrow \dot{\theta}(0) = -0.5885 C_1 e^{0} + -12.7449 C_2 e^{0} = 0 $$
$$ \Rightarrow -0.5885 C_1 + -12.7449 C_2 = 0 $$
の関係式が得られます。
この2式を連立方程式として解くことで\(C_1\)と\(C_2\)は、
$$ C_1 = 1.0484 $$
$$ C_2 = -0.0484 $$
となります。
よって、ケース1のパラメータでのシステムの運動は、
$$ \theta(t) =1.0484 e^{-0.5885 t} + -0.0484 e^{-12.7449 t}$$
と表すことが出来ます。
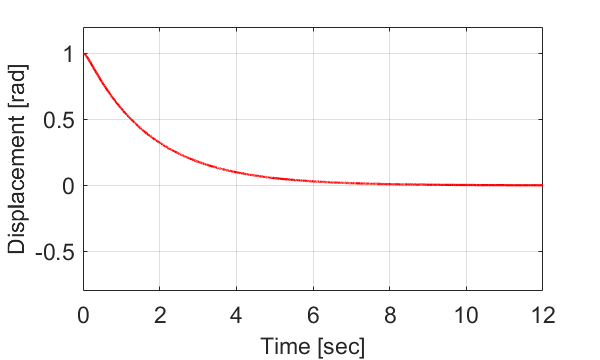
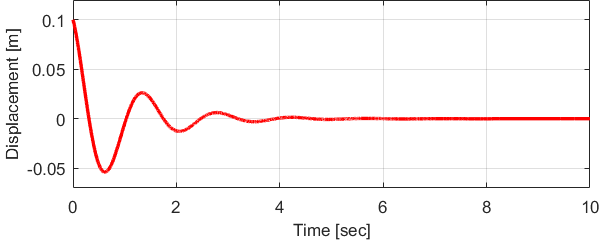
グラフで見ると、棒の角度が初期角度の\(\theta_0=1[rad]\)から徐々に小さくなり、0に近づくことが分かります。
このようなシステムを加減衰システム(Overdamped System)と言います。
まとめ
今回は、実際に質量-ばね-ダンパーモデルを例にとって、運動方程式からシステムの運動を求める方法を紹介しました。
今回の例では、加減衰システム(Overdamped System)となる場合を取り扱い、システムの運動の様子を数式とグラフで表しました。
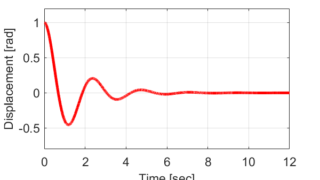
次回は、他の2つのケース(臨界減衰システムと不足減衰システム)となる場合について、説明したいと思います。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
