



ロボットや工作機械を滑らかに動作させるためには、滑らかな軌跡な生成が重要になります。
今回の記事では、この軌跡生成について全体像や基本知識について紹介します。
軌跡生成とは
基本的な軌跡生成(Trajectory Generation)の問題は、2つの要素の時間や空間での関係を見つけるという問題です。
例えば、2つの位置の間をどのように(どんな速度でどのような経路で)移動すれば良いかという関係を見つけ、目的の軌跡を生成します。
通常、ロボットに与えられる軌跡は時間でのパラメトリック関数(Parametric Function)で表されます。
このパラメトリック関数は、各時間における所望の位置を表しています。
軌跡生成の問題
実際に軌跡生成で得られた関数でロボットに適応するためには、様々な要素を考慮する必要があります。
ここでは、考慮すべき問題点について紹介します。
軌跡の離散化
まず、軌跡生成に際し考慮するべき要素として時間的離散化があります。
一般的に、ロボットや機械はデジタルな制御システムで動作しています。
その結果、ロボットや機械に与える位置の指令も離散的な時間の関数で与える必要があります。
そのため、軌跡生成で得られた連続的な時間で表されいるパラメトリック関数に対して離散化を行い、離散時間の関数に変換する必要があります。
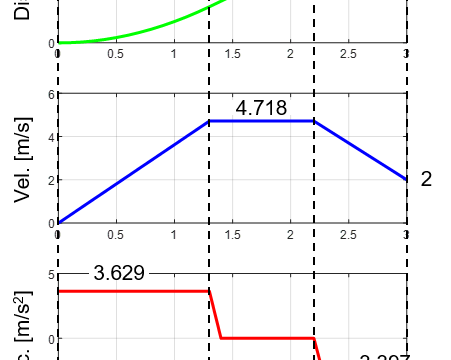
駆動システムの制限
ロボットを動かすモーターなどの駆動システムは、当然ながら出力できるトルクに限界があります。
これにより、単位時間あたりに変化できるロボットの位置や速度の大きさにも限界が生じます。
そのため軌跡を生成する際には、この駆動システムの規格や制限を考慮し、ロボットに送る軌跡の速度や加速度を制限(コントロール)する必要があります。
負荷による振動
ロボットに急激な動作を含む軌跡を指令として与えると、各関節の急激な動作により振動が発生します。
このような振動が発生すると、ロボットの手先の精度が悪くなり、作業の質が低下してしまいます。
また、ロボットの手先に力が与えられるなど、外部から負荷が加わったときにも振動が発生してしまいます。
そのため、軌跡生成を行う際には、このようなロボットの精度に影響を与える振動を避けるように軌跡を生成することが求められます。
軌跡生成のカテゴリー
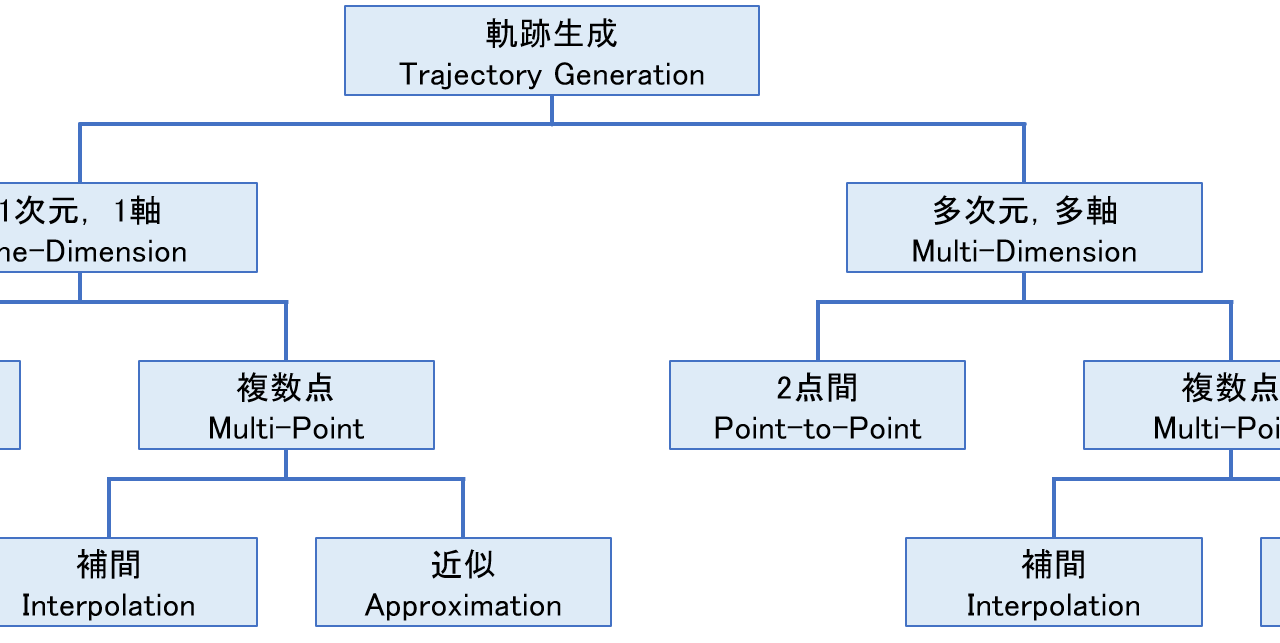
軌跡生成の種類について、主なカテゴリーに分けた結果を下図に示します。

まず、軌跡生成は大きく1次元(1軸)の軌跡と多次元(多軸)の軌跡に分けられます。
1次元の軌跡生成は、1つの関節のみを制御する場合や、直線上を真っ直ぐ制御する場合に用います。
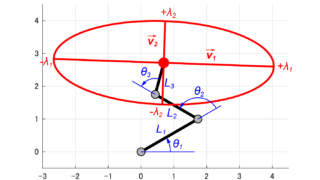
一方、多次元の軌跡生成は、平面上や3次元空間、複数の関節や軸を同時に制御する場合に適用します。
1次元の軌跡とは異なり、多次元の軌跡を生成する際には各軸の動作を同期させる必要があります。
そして、1軸と多軸のそれぞれの軌跡について、2点間を結んだPoint-to-Point(P2P)の軌跡と、多数の点を考慮したMulti-Pointの軌跡があります。
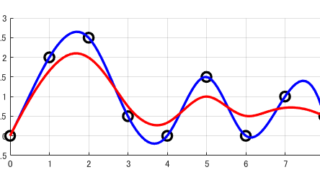
さらに、多数の点を考慮したMulti-Pointの軌跡生成には補間(Interpolation)による軌跡生成法と近似(Approximation)による軌跡生成法の2つがあります。
補間と近似の軌跡生成については、次回の記事で詳しく紹介します。
まとめ
今回の記事では、軌跡生成について基本的な知識とその問題点、主なカテゴリー分けについて紹介しました。
次回の記事では、本記事中のカテゴリー分けの部分で紹介した軌跡の補間と近似について紹介したいと思います。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
