



今回は動的システムを状態空間モデル(State Space Model)で表す方法を紹介します。
状態空間モデルとは
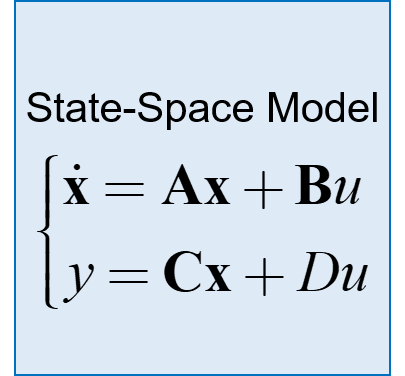
入力が\(u\)で出力が\(y\)とした時の状態空間モデルは、
$$ \begin{eqnarray} \left\{ \begin{array}{l} \dot{\boldsymbol{ x }} = \boldsymbol{ A } \boldsymbol{ x } + \boldsymbol{ B } u \\ y = \boldsymbol{ C } \boldsymbol{ x } + D u \end{array} \right. \end{eqnarray} $$
となります。
\(x\)は状態ベクトルというもので、システムの状態を示しています。
$$ \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{bmatrix} $$
状態空間モデルの内、1つ目の\(\dot{x}\)についての式が状態方程式と呼ばれます。
システムの状態\(x\)が入力\(u\)によってどう変化するかを表しています。
2つ目の\(y\)についての式は、出力方程式と呼ばれます。
システムの状態\(x\)および入力\(u\)と観測する出力\(y\)との関係を示しています。
質量-ばね-ダンパーシステムの状態空間モデル
質量-ばね-ダンパーシステムを例に実際に状態空間モデルを求めていきます。
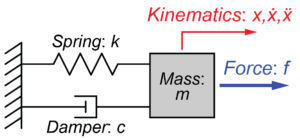
このシステムの線形微分方程式は、
$$ m \ddot{x}(t) + c \dot{x}(t) + k x(t) = f(t) $$
と表されます。
詳しくは、この記事を参照してください。

状態方程式
システムの線形微分方程式を\(\ddot{x}\)についての式にすると、
$$ \ddot{x}(t) = – \frac{c}{m} \dot{x}(t) – \frac{k}{m} x(t) + \frac{1}{m} f(t) $$
となります。
状態ベクトルを
$$ \boldsymbol{ x } = \begin{bmatrix} \dot{x} \\ x \end{bmatrix} $$
とすると、状態方程式は、
$$ \boldsymbol{ \dot{x} } = \begin{bmatrix} \ddot{x} \\ \dot{x} \end{bmatrix} = \begin{bmatrix} -\frac{c}{m} & -\frac{k}{m} \\ 1 & 0 \end{bmatrix} \boldsymbol{ x } + \begin{bmatrix} \frac{1}{m} \\ 0 \end{bmatrix} f = \begin{bmatrix} -\frac{c}{m} & -\frac{k}{m} \\ 1 & 0 \end{bmatrix} \begin{bmatrix} \dot{x} \\ x \end{bmatrix} + \begin{bmatrix} \frac{1}{m} \\ 0 \end{bmatrix} f $$
と表すことが出来ます。
実際にこの状態方程式を計算(展開)してみると、
$$ \ddot{x}(t) = – \frac{c}{m} \dot{x}(t) – \frac{k}{m} x(t) + \frac{1}{m} f(t) $$
$$ \dot{x}(t) = \dot{x}(t) $$
となり、求めた状態方程式が正しいことが分かります。
出力方程式
観測したい出力\(y\)を
$$ y = x $$
とすると、出力方程式は、
$$ y = \begin{bmatrix} 0 & 1 \end{bmatrix} \begin{bmatrix} \dot{x} \\ x \end{bmatrix} + \begin{bmatrix} 0 \end{bmatrix} f $$
となります。
実際にこの出力方程式を計算してみると、
$$ y = x $$
となり、求めた出力方程式が正しいことが分かります。
よって、質量-ばね-ダンパーシステムの状態空間モデルにおける各行列およびベクトルは、
$$ \boldsymbol{ A } = \begin{bmatrix} -\frac{c}{m} & -\frac{k}{m} \\ 1 & 0 \end{bmatrix} , \boldsymbol{ B } = \begin{bmatrix} \frac{1}{m} \\ 0 \end{bmatrix} , \boldsymbol{ C } = \begin{bmatrix} 0 & 1 \end{bmatrix} , D = \begin{bmatrix} 0 \end{bmatrix} $$
となります。
まとめ
今回は、動的システムを状態空間モデル(State Space Model)で表す方法を説明しました。
次回は、伝達関数で表したモデルと今回の状態空間モデルとの関係を紹介していきたいと思います。



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
