



ロボットを高速かつ高精度に制御するためには、離散的な指令点から連続する滑らかな軌跡を生成する必要があります。
今回の記事では、連続する離散点から軌跡生成する方法として、軌跡の補間と近似について紹介します。
連続する離散指令の軌跡生成
ロボットに与えられる指令(位置やトルクなど)が離散的な場合、そのままではロボットを目標の軌跡に沿って動作させることが出来ません。
離散点と離散点の間をどのように動けばよいか分からないためです。
そのため、離散的な指令点が与えられたときには、それらの離散点から連続的な軌跡を生成する必要があります。
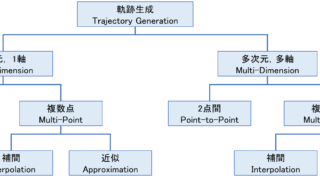
この連続した離散点から軌跡を生成する方法として、大きく軌跡の「補間」と「近似」の2つがあります。
以下では、この補間と近似についてと、それぞれの比較を紹介します。
離散点補間による軌跡生成
軌跡補間では、離散点と離散点を補間することで、与えられた点を通過する曲線で軌跡を生成します。
離散点補間による軌跡生成の様子を下図に示します。

離散点補間により、連続する離散点指令(黒丸印)を通過する滑らかな軌跡(青線)が生成されます。
離散点補間では、連続する離散点を通過する複雑な動作を、いくつかの連続するPoint-to-Point(P2P)軌跡で定義します。
この時、それぞれのP2P軌跡における始点と終点では、位置に加えて速度や加速度といった制約条件が用いられます。
これにより、P2P軌跡をつなぎ合わせて出来上がった軌跡は、各離散点における軌跡の接続点でも滑らかで連続した軌跡になります。
関数近似による軌跡生成
軌跡近似では、離散点を用いて関数で近似することにより、ある程度の許容範囲内を通る曲線で軌跡を生成します。
関数近似による軌跡生成の様子を下図に示します。
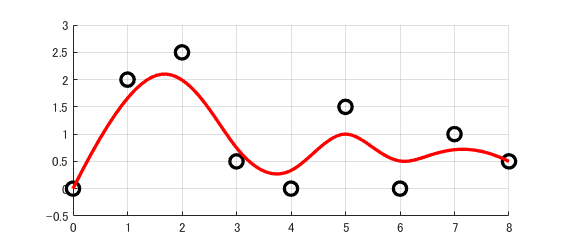
関数近似により、離散的な指令点(黒丸印)をもとに滑らかな軌跡(赤線)が生成されています。
軌跡補間とは異なり、必ずしも与えられた指令点を通過する必要はありません。
そのため、生成された軌跡は全体的に最適化され、より滑らかな軌跡となります。
一方で、指令点を通過しないため、正確な制御を行う際には誤差などに注意する必要があります。
補間と近似の比較

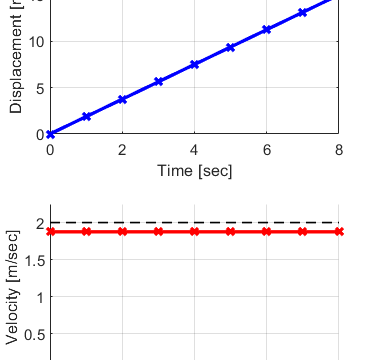
補間により生成された軌跡(青線)は、確実に与えられた指令点を通過するため、正確な動作が実現できます。
近似により生成された軌跡(赤線)では、一般的に補間比べて滑らかな軌跡になることから、動作に必要な速度や加速度の値が小さく滑らかになるという利点があります。
下記に補間と近似の比較をまとめた表を示します。

まとめ
今回は離散点に対する軌跡の生成法について、補間と近似による軌跡生成について紹介しました。
記事中で紹介したように、軌跡補間と軌跡近似のそれぞれに特徴があります。
目的に合わせて軌跡を補間するべきか近似するべきかを選択し、最適な軌跡の生成を行います。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
