



アクチュエータによる動作の方向を変える働きを持つ機械要素としてカムがあります。
カムには、機械カムと電子カムの2種類があります。
今回の記事では、この機械カムと電子カムについて説明し、それぞれの特徴や注意点を紹介します。
機械カムとは
機械カム(Mechanical Cam)とは、任意の形状により運動の方向を変える働きを持つ機構です。
この機械カムは広く昔から使われています。
機械カムを用いることで、回転運動を直線運動に変更したり、円運動から楕円運動に変換したりなど、カムの形状を変更することにより任意の方向に運動を変えることが出来ます。
機械カムの利点としては、同時に複数の動作を制御しやすいという点があります。
マスターと呼ばれる主軸モータによる動力に、スレーブと呼ばれる複数のカムを接続します。
こうすることで、簡単に複数軸の動作の同期をとることが出来ます。
一方で機械カムの欠点としては、軌跡の変更が難しいという点があります。
軌跡を変更する際には、カムの形状を変更する必要があり、簡単に切り替えることが難しいためです。
電子カムとは
電子カム(Electronic Cam)とは、アクチュエータに送る信号により動作を変えるシステムです。
この電子カムは近年になって広く用いられるようになりました。
電子カムの利点として、電子カムを用いることで動作の変更が容易になる点があります。
アクチュエータに送る制御信号軌跡をプログラムで変更することで、簡単に動作が変わります。
一方で、電子カムの欠点として、複数軸の動作をする際に各軸の運動を同期させるための処理が必要であるという点があります。
機械カムから電子カムへ
近年では、機械カムから電子カムへの置き換えが広く行われています。
機械カムから電子カムへ置き換える利点としては、
- 動作変更の自由度が高い
- パフォーマンスの向上をさせやすい
- プログラムの変更が容易
- コストが低い
などが考えられています。
先に記した通り、電子カムでは入力信号により運動を制御するため、プログラムで入力振動を変更することで容易に運動を変更することが出来ます。
一方で、電子カムの欠点である複数動作の同期については考慮する必要があります。
たとえ各運動軸に送る制御信号を同期させたとしても、実際のモータが必ずしも同期するとは限らないこともあります。
この運動の同期をするためにも、電子カムを要する制御システムには高い追従性が必要になります。
例えば、
- 制御系が高応答である
- サーボを含むループゲインが高い
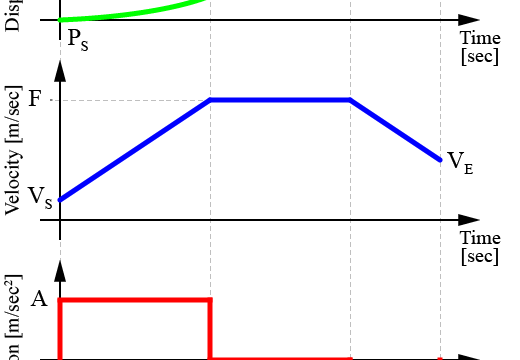
- サーボモータの最大速度および加速度を考慮した制御信号
- 誤差要因の影響を防ぐためのフィードフォワード制御
等を考える必要があります。
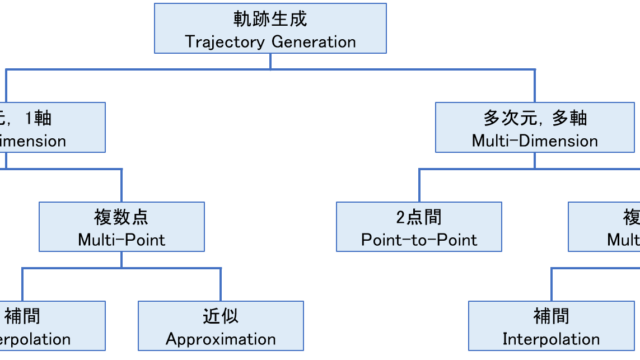
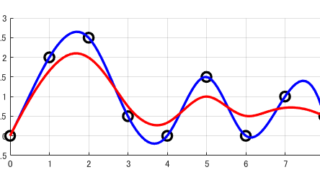
この中で、高い追従性を実現するためにも、軌跡生成は重要になります。
このシリーズで説明している軌跡生成の知識が、電子カムを含むシステム、言い換えるとサーボモータによる制御システムに重要となってきます。
まとめ
今回の記事では、機械カムと電子カムのそれぞれについての特徴を紹介しました。
現在では、機械システムに柔軟性を求められることが多いことから、電子カムにより機械カムが置き換えられています。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
