



MIMO系の状態方程式(状態空間モデル)や伝達関数について、実際に例題を解きながら求めていきたいと思います。
MIMO系の状態方程式と伝達関数についての詳細は、この記事を参考にして下さい。
2質量システム
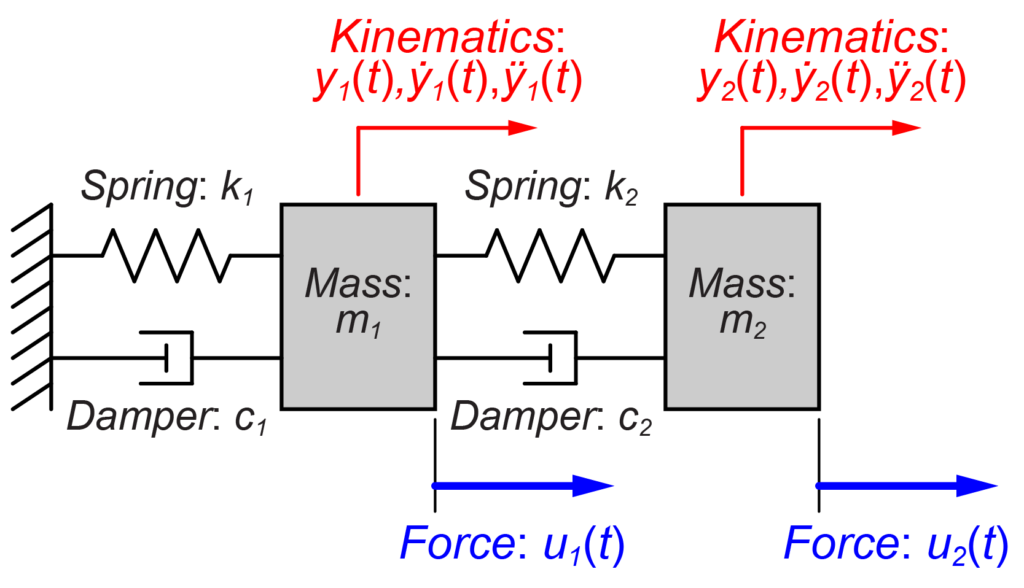
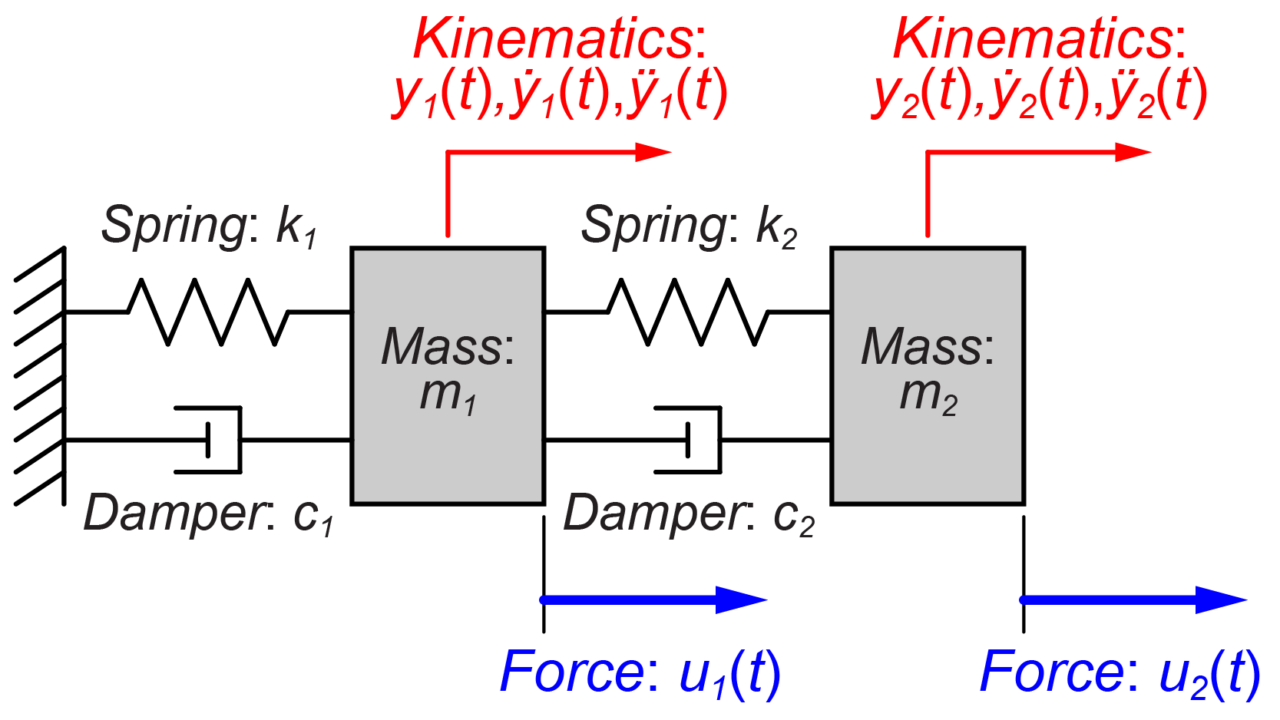
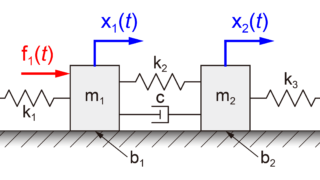
今回は、このような多入力、多出力システムについて考えていきます。
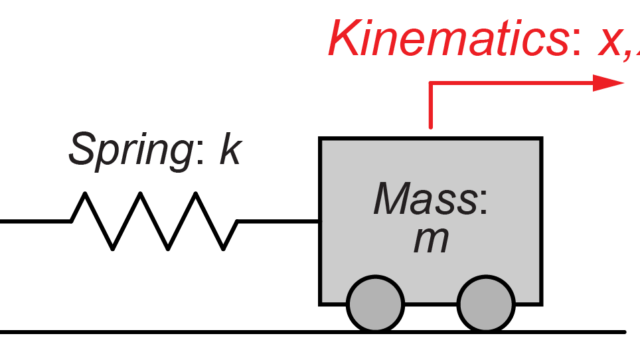
まず、質量\(m_1\)がばね\(k_1\)とダンパー\(c_1\)で壁に取り付けられています。
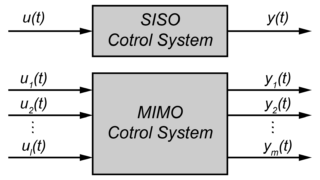
これだけなら、SISO系のモデル(入力:\(u_1\)、出力:\(y_1\))として簡単に解くことが出来ます。
SISO系システムの解き方については、この記事を参考にしてください。

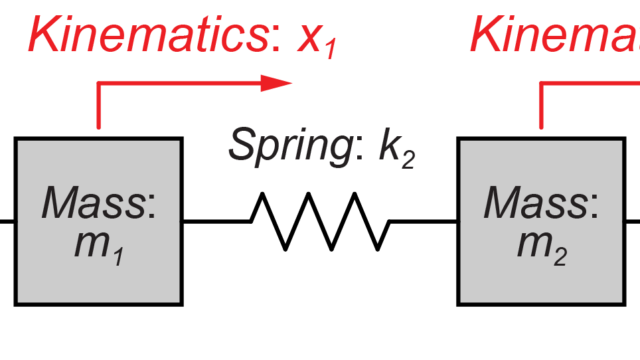
加えて質量\(m_2\)がばね\(k_2\)とダンパー\(c_2\)で質量\(m_1\)に取り付けられています。
質量(\(m_1\)と\(m_2\))にそれぞれ入力として力(\(u_1\)と\(u_2\))が加わった時の各質量の変位(\(y_1\)と\(y_2\))を出力を求めたいと思います。
このシステムの入出力は
- 入力:\(u_1\)、\(u_2\)
- 出力:\(y_1\)、\(y_2\)
と2つ以上なので、この2質量系のシステムはMIMO系システムとなります。
MIMOシステムの運動方程式
例題の2質量システムについて運動方程式を求めていきます。
運動方程式については、この記事を参考にしてください
MIMOシステムの運動方程式を求めるために、各質量(\(m_1\)と\(m_2\))についてそれぞれの運動方程式を求めます。
質量\(m_1\)についての運動方程式
質量\(m_1\)の加速度は\(\ddot{y_1}\)で表すことが出来ます。
(\(\ddot{y_1}\)は\(y_1\)の二階微分です。)
質量\(m_1\)にかかる力\(f\)は入力\(u_1\)です。
そして左側のばね\(k_1\)とダンパー\(c_1\)から受ける力は、
$$ f_{k_1} = k_1 y_1 $$
$$ f_{c_1} = c_1 \dot{y_1} $$
となります。
向きは左向き(変位\(y_1\)と逆向き)になります。
次に右側のばね\(k_2\)とダンパー\(c_2\)から受ける力を求めていきます。
ばね\(k_2\)による力を計算するために、ばねにかかる変位を考えていきます。
図からばね\(k_2\)の変位は\(y_2 – y_1\)で求められます。
この時のばね\(k_2\)による力は、
$$ f_{k_2} = k_2 \left( y_2 – y_1 \right) $$
となります。
この力\(f_{k_2}\)の向きは右向き(変位\(y_1\)と同じ向き)になります。
ばね\(k_2\)が伸びる(\(y_2 – y_1\)が大きくなる)ほど、ばね\(k_2\)は縮もうとします。
その結果、質量\(m_1\)を右に引くからです。
次に、ダンパ―\(c_2\)による力を計算するために、ダンパー\(c_2\)にかかる速度を考えていきます。
図からダンパー\(c_2\)の速度は\(\dot{y_2} – \dot{y_1}\)で求められます。
この時のダンパー\(c_2\)による力は、
$$ f_{c_2} = c_2 \left( \dot{y_2} – \dot{y_1} \right) $$
となります。
この力\(f_{c_2}\)の向きは右向き(変位\(y_1\)と同じ向き)になります。
ばね\(k_2\)の時と同様に、ダンパー\(c_2\)が伸びる(\(\dot{y_2} – \dot{y_1}\)が大きくなる)ほど、ダンパー\(c_2\)はそれを防ごうとして、質量\(m_1\)から右に力\(f_{c_2}\)を与えます。
よって、質量\(m_1\)についての運動方程式は、
$$ m_1 \ddot{y_1} = u_1 – k_1 y_1 – c_1 \dot{y_1} + k_2 \left( y_2 – y_1 \right) + c_2 \left( \dot{y_2} – \dot{y_1} \right) $$
となります。
質量\(m_2\)についての運動方程式
質量\(m_1\)の流れと同様に、質量\(m_2\)まわりの運動方程式を求めていきます。
質量\(m_2\)の加速度は\(\ddot{y_2}\)で表すことが出来ます。
(\(\ddot{y_2}\)は\(y_2\)の二階微分です。)
質量\(m_2\)にかかる力\(f\)は入力\(u_2\)です。
そしてばね\(k_2\)とダンパー\(c_2\)から受ける力は、
$$ f_{k_2} = k_2 \left( y_2 – y_1 \right) $$
$$ f_{c_2} = c_2 \left( \dot{y_2} – \dot{y_1} \right) $$
となります。
向きは左向き(変位\(y_2\)と逆向き)になります。
よって、質量\(m_2\)についての運動方程式は、
$$ m_2 \ddot{y_2} = u_2 – k_2 \left( y_2 – y_1 \right) – c_2 \left( \dot{y_2} – \dot{y_1} \right) $$
となります。
まとめ
今回は、2質量系モデルの運動方程式の算出までを行いました。
次回は、算出した運動方程式を使ってMIMOシステムの状態方程式と伝達関数を求めていきます。
合わせて読みたい
回転運動モデルの場合はこちら
摩擦を含むモデルの場合はこちら




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
