



 制御工学
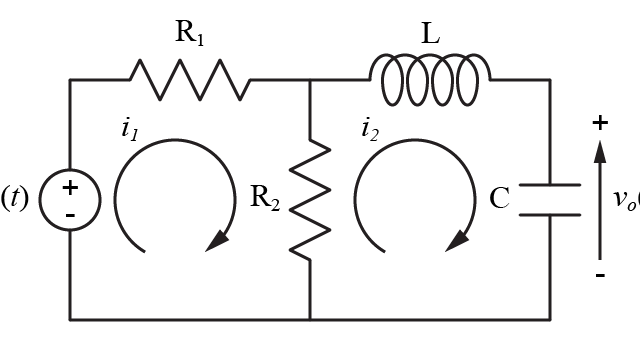
制御工学電気回路システムを伝達関数で表す:RLC回路
2018-01-23 tajima Tajima Robotics
ロボットを制御するために、伝達関数(Transfer Function)を用いて、ロボットのシステムを数式で表すという方法があります。 伝達関数を用いることで …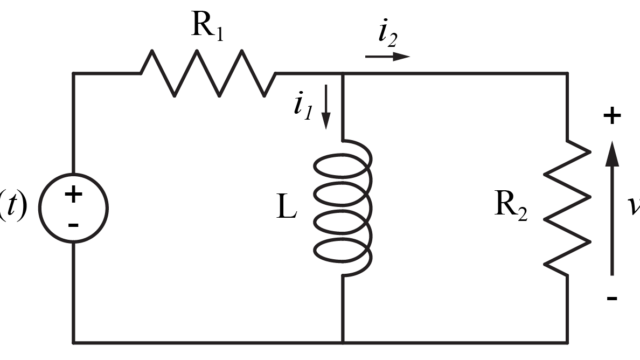 制御工学
制御工学電気回路システムを伝達関数で表す:RL回路
2018-01-21 tajima Tajima Robotics
ロボットを制御するためには、伝達関数(Transfer Function)を用いて、システムを表すことが多くあります。 伝達関数を用いることで、ある信号をシス …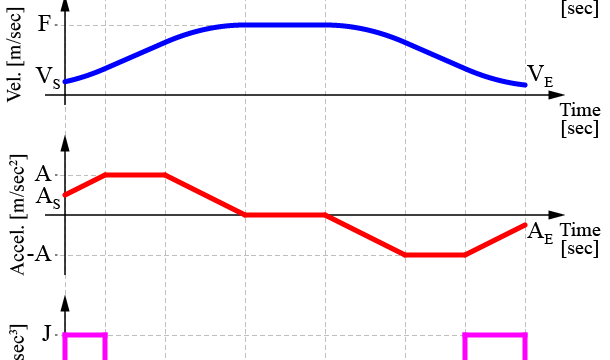 軌跡生成
軌跡生成ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する(その2)
2018-01-20 tajima Tajima Robotics
ロボットの加減速時に躍度(Jerk)を制御することで、台形加速度(Trapezoidal Acceleration)の軌跡を生成する … 軌跡生成ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する
2018-01-18 tajima Tajima Robotics
加速度(Acceleration)の単位時間当たりの変化率を表すものとして、躍度(Jerk、加加速度)があります。 今 …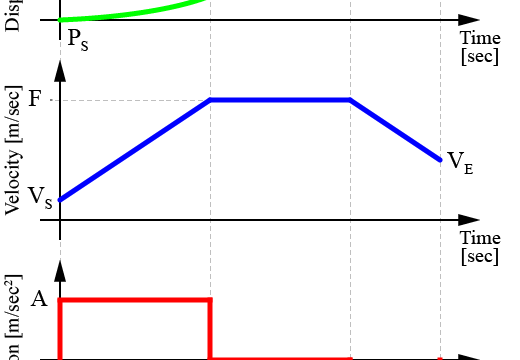 軌跡生成
軌跡生成ロボットの軌跡生成:加速度制限を用いて台形速度プロファイルを作成する
2018-01-17 tajima Tajima Robotics
ロボットの軌跡を生成する際に重要な項目として、 モータの出力できる限界を使って
短い時間で移動する という点が … 制御工学
制御工学ラプラス変換を使って微分方程式を解く
2018-01-16 tajima Tajima Robotics
各時間\(t\)でのロボットの速度\(\dot{x}(t)\)や位置\(x(t)\)を求めたり、目標通りに制御するために、微分方程式(Differential Equati …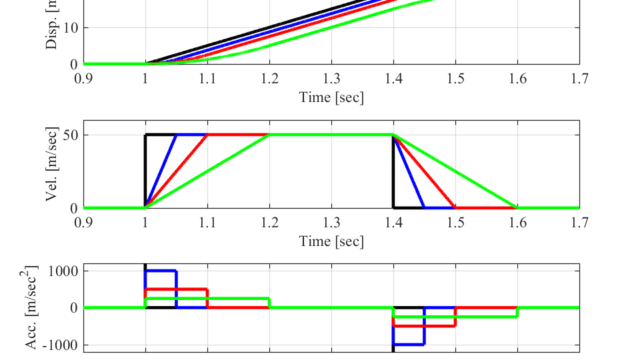 軌跡生成
軌跡生成ロボットの軌跡生成:移動平均関数を使って加減速を制御する
2018-01-15 tajima Tajima Robotics
ロボットが移動する際に加速度を考慮した軌跡生成の方法として、 指数関数型(Exponential Model)
移動 … 軌跡生成
軌跡生成ロボットの軌跡生成:指数関数を使って加減速を制御する
2018-01-14 tajima Tajima Robotics
ロボットが移動する際に加速度を考慮した軌跡生成の方法として、 指数関数型
移動平均型 の2つを前回の記事で紹介 …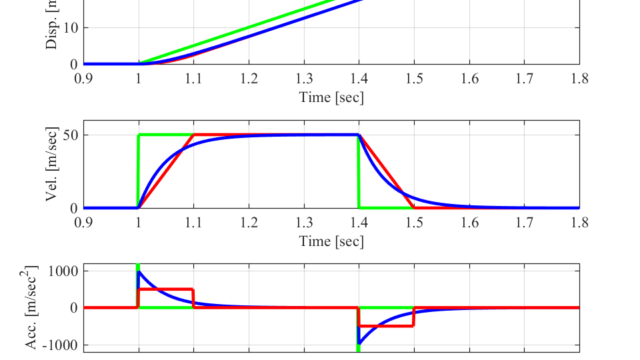 軌跡生成
軌跡生成ロボットの軌跡生成:加速度制御
2018-01-13 tajima Tajima Robotics
ロボットが移動する際の加速度を考慮した軌跡生成(Trajectory Generation)の方法を紹介します。 以前に紹介した直線補間(Linear Int …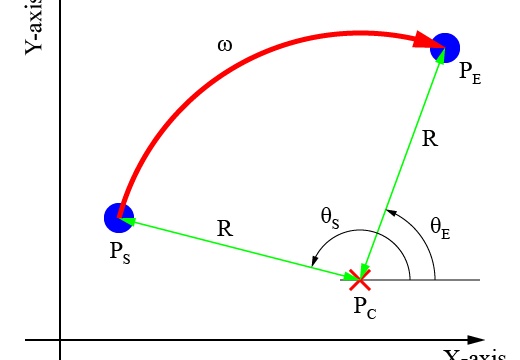 軌跡生成
軌跡生成ロボットの軌跡生成:円弧補間
2018-01-12 tajima Tajima Robotics
ロボットがXY平面上の点から他の点へ移動する軌跡生成(Trajectory Generation)の方法には、 直線補間(Linear Interpolation …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
