



ロボットや工作機械の軌跡を生成する際には、様々な要素を考慮する必要があります。
例えば、アクチュエータの最大速度や加速度、最大トルクなどです。
加えて、1次元(1軸)ではなく多次元(多軸)の軌跡を生成する場合には、複数運動の同期制御を考える必要があります。
今回の記事では、1次元や多次元の軌跡生成をする際に考慮すべきこと、注意点について紹介します。
1次元での軌跡生成
近年のロボットや機械では、1次元ではなく多次元の軌跡を取り扱うことが多いです。
ただ単純そうである一次元の動作システムを制御する際でも、多くの要素を考慮する必要があります。
例えば
- サーボの応答性
- モータの性能
- 制御ループのゲイン
などです。
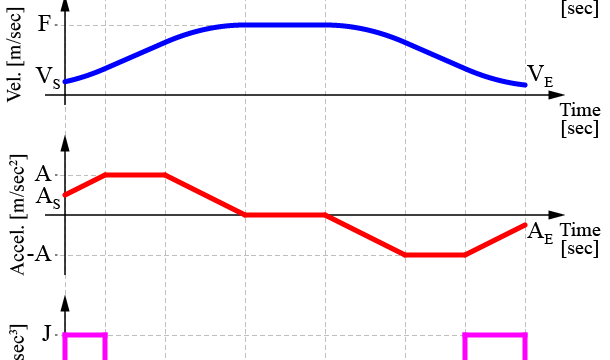
このような1次元の軌跡生成における考慮する条件として、
- 開始点と終了点
- 速度や加速度
- 動作時間
などがあります。
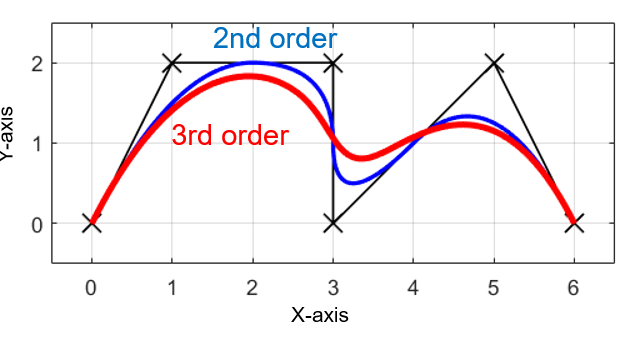
どのようなタイプの軌跡を生成するかによって、軌跡に含まれる最大速度や最大加速度の値が変わったり、軌跡の周波数成分が変化します。
これにより、制御時に生じる追従誤差の程度も変わります。
そのため、目標となるアプリケーションに対して、どのような形状の軌跡を生成するかを選択することは重要になります。
多次元での軌跡生成
ロボットの軌跡を生成する場合、多くのケースにおいて3次元空間での軌跡を考える必要があります。
ロボットを構成するいくつかのアクチュエータに、それぞれの信号をプログラムして制御します。
この場合、多くの用途では目標となる作業空間における多次元の軌跡を達成するため、アクチュエータの同期が必要になります。
作業空間での軌跡が重要となる用途として、工作機械による切削や研削、穴あけなどの機械加工や、ロボットによる溶接や接着、搬送などがあります。
軌跡生成での注意点
このような多次元の軌跡を取り扱うアプリケーションでは、
- 生成された軌跡が実現可能な曲線で、追従可能であること
- 生成された軌跡を追従するための動力を、アクチュエータが出力可能であること
に注意する必要があります。
まず当然のことかもしれませんが、生成された軌跡はロボットが到達可能な軌跡である必要があります。
その上で、生成された軌跡をロボットが追従するために必要な速度や加速度、トルクが、動作システムの最大速度や加速度、トルクを超えないという条件を守る必要があります。
このような制約条件の下で追従可能な軌跡が作業空間にて生成されます。
作業空間で軌跡が生成された後は、逆運動学を用いて関節空間での軌跡に変換します。
この関節空間での軌跡を用いて、各アクチュエータの制御を行います。
まとめ
今回の記事では、ロボットや工作機械の1次元や多次元の軌跡について、特徴や考慮すべき条件、注意点等を紹介しました。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
