



ロボットや工作機械を制御するために、フィードフォワード制御系やフィードバック制御系など様々な制御系があります。
その中で、カスケード型制御は工作機械の位置決め制御や送り制御に広く用いられています。
今回の記事では、このカスケード型制御系の基本構成をブロック線図を用いて紹介していきます。
カスケード型制御系の基本構成
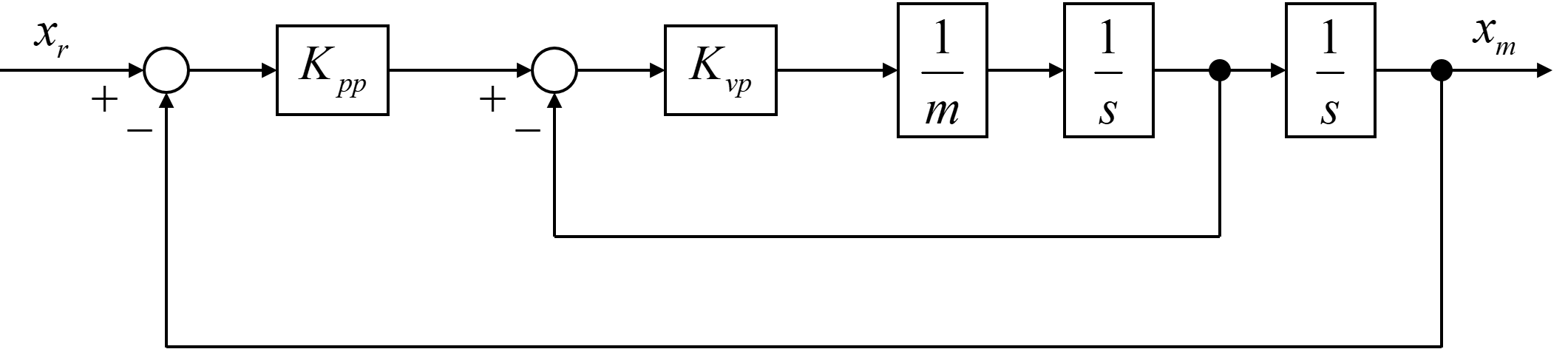
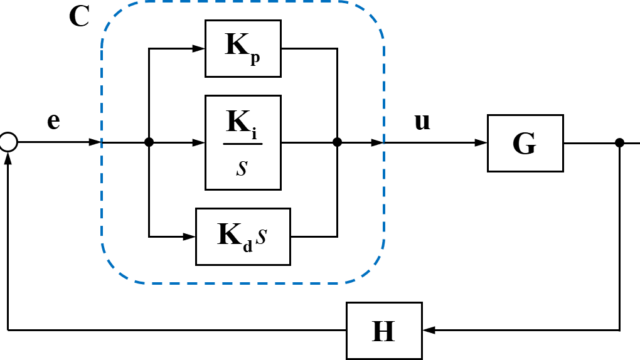
下のブロック線図のように、1つのフィードバックループの中にもう1つのフィードバックループが入った制御モデルをカスケード型制御系と言います。
このカスケード型制御系のブロック線図を伝達関数で表すと
$$ \frac{x_m}{x_r} = \frac{K_{vp} K_{pp}}{m s^2 + K_{vp} s + K_{vp} K_{pp}} $$
となります。
では、このカスケード型制御系の特徴について、フィードフォワード制御系とフィードバック制御系と比較しながら紹介していきます。
今回の記事では、各制御系を単純に比較するために、質点mに対する位置制御系について考えます。
フィードフォワード制御系
まず、フィードフォワード制御系のブロック線図を下図に示します。

入力に対して、微分器を2つと質点mの値を用いてフィードフォワードすることで、質点mを制御しています。
フィードフォワード制御の利点
フィードフォワード制御系の利点としては、
- 位置指令から位置応答までの伝達関数が1となる
- そのため、指令値の応答性が良い
という点があります。
フィードフォワード制御の欠点
一方で、フィードフォワード制御系の欠点として、
- 外乱の抑制が出来ない
- 質点mを正確に把握する必要がある
- 微分(s)が2回含まれているため、指令値生成時に考慮する必要がある
という点があります。
フィードバック制御系
フィードフォワード制御で生じる問題を解決するために、フィードバック制御が用いられます。
フィードバック制御系のブロック線図を下図に示します。
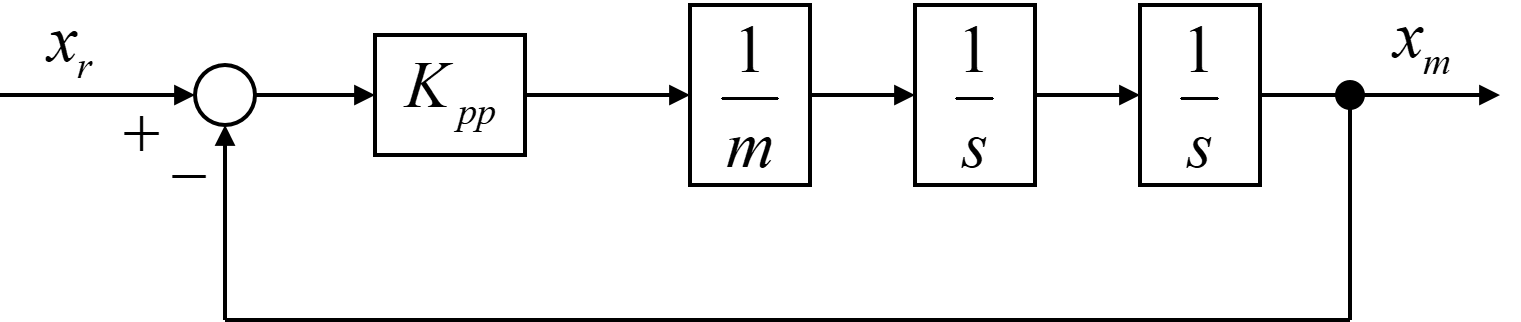
上記の図は、もっともフィードバック制御系のシンプルな例として、比例制御器を用いた位置制御系です。
フィードバック制御の利点
フィードバック制御系はフィードフォワード制御に対して、
- 外乱の抑制が可能
- 質点mが不正確でも大丈夫
- 微分器がない
という利点があります。
フィードバック制御の欠点
ただ、今回紹介しているフィードバック制御系の問題としては、
- 応答が持続的に振動する
という点があります。
カスケード型制御系
そこで、2つのループを用いたカスケード型制御系が用いられています。
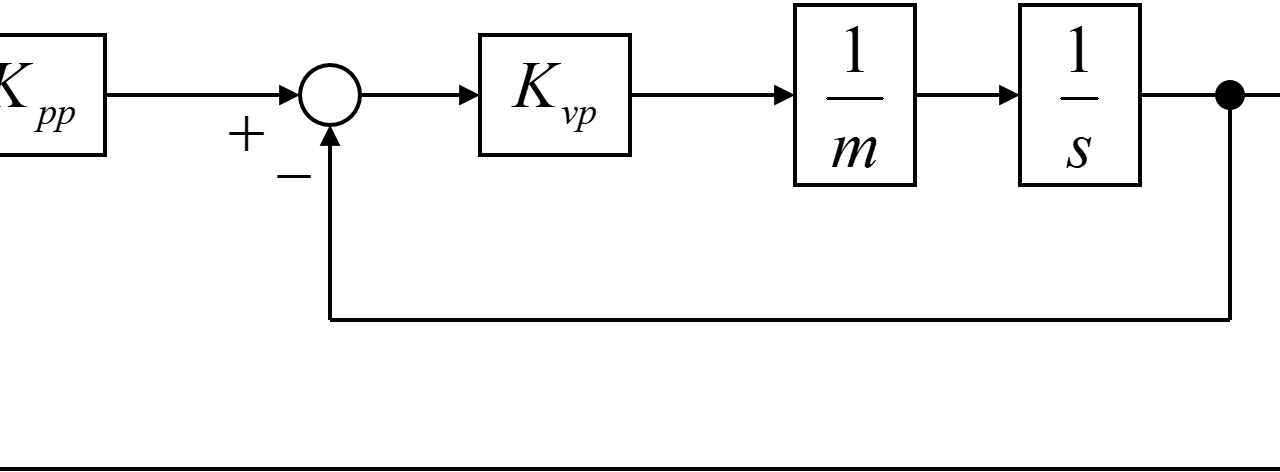
カスケード型制御系のブロック線図を下記に示します。
上記のように、カスケード型制御系では位置制御系のフィードバック部分の内側に速度ループを追加します。
カスケード型制御系の伝達関数
このようなカスケード型制御にすることで、システムの伝達関数は、
$$ \frac{x_m}{x_r} = \frac{K_{vp} K_{pp}}{m s^2 + K_{vp} s + K_{vp} K_{pp}} $$
と表すことが出来ます。
この伝達関数より、
- Kvpを大きくすることで、振動が減衰する
- KvpKppを大きくすることで、応答性が速くなる
という制御が可能な事が分かります。
カスケード型制御系の利点や欠点については、こちらの記事を参考にしてください。

まとめ
今回の記事では、工作機械の位置決め制御や送り制御に広く用いられているカスケード型制御系について、その基本構成をブロック線図や伝達関数を用いて紹介しました。
また、フィードフォワード制御系やフィードバック制御系と違いについても、ブロック線図や各々の利点や欠点を比較しながら紹介しました。
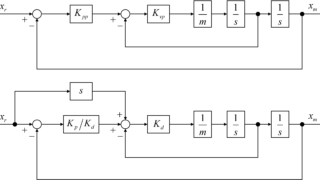
次回は、今回紹介したカスケード型制御系のブロック線図を、PD制御系のブロック線図と比較して紹介したいと思います。





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
