



 軌跡生成
軌跡生成5次スプライン曲線で離散点を滑らかに補間する方法
2019-02-09 tajima Tajima Robotics
滑らかで連続的な指令を用いることで、ロボットや機械をスムーズに制御することが出来ます。 しかし、ロボットや機械を制御す … 軌跡生成
軌跡生成スプライン曲線のパラメータを行列式で簡単に算出する方法
2019-02-07 tajima Tajima Robotics
スプライン曲線を用いることで離散点を補間することが出来ます。 このスプライン曲線を書くためには、式に含まれる各係数のパ … 軌跡生成5次スプライン曲線で離散点を補間してロボットの軌跡を生成する(2)
2019-02-01 tajima Tajima Robotics
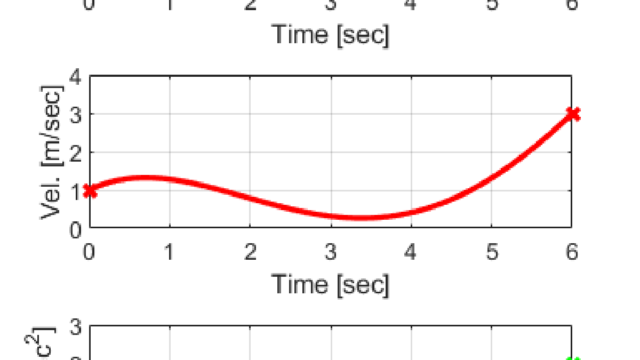
5次スプライン曲線を用いて滑らかな軌跡を生成することで、ロボットや機械を滑らかに制御することが出来ます。 前回の記事で … 軌跡生成5次スプライン曲線で離散点を補間してロボットの軌跡を生成する
2019-01-29 tajima Tajima Robotics
滑らかな指令の軌跡をロボットや機械に与えることで、ロボットや機械を滑らかに制御することが出来ます。 しかし、通常ロボッ …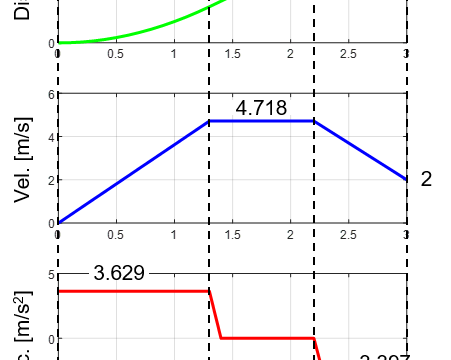 軌跡生成
軌跡生成加速度を制限して生成した軌跡を量子化して機械を正確に制御する
2019-01-21 tajima Tajima Robotics
加速度制限による台形速度制御を行うことで、ロボットや機械を滑らかに動作させることが出来ます。 https://tajimaro …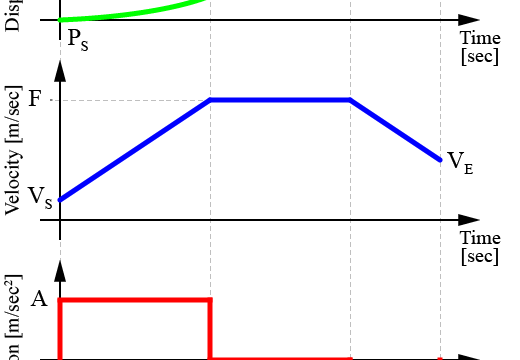 軌跡生成
軌跡生成台形速度プロファイルの軌跡を量子化してロボットを精密制御する
2019-01-17 tajima Tajima Robotics
ロボットの軌跡を生成する際に、加速度を制限した台形速度プロファイルを用いることで、ロボットを滑らかに制御することが出来ます。 …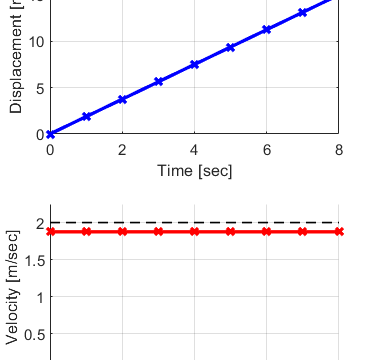 軌跡生成
軌跡生成軌跡生成の量子化をしてロボットを正確に制御する
2019-01-12 tajima Tajima Robotics
加速度制限や躍度制限による軌跡を生成することで、滑らかにロボットを制御できます。 以前の記事でも、これらの軌跡生成手法 …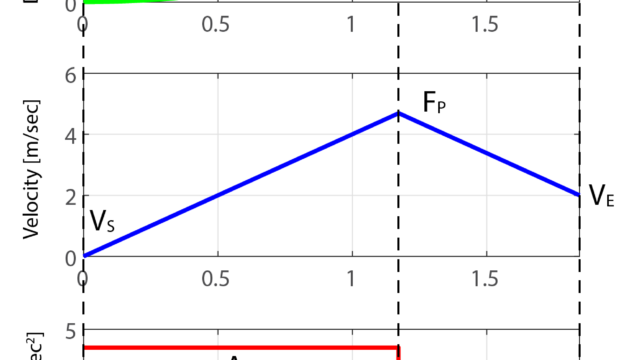 軌跡生成
軌跡生成加速度制限台形速度プロファイルによる軌跡生成の注意点:巡航期間が無い場合
2019-01-08 tajima Tajima Robotics
加速度制限による台形速度プロファイルを用いることで、ロボットを滑らかに制御することが可能になります。 前回までの記事で …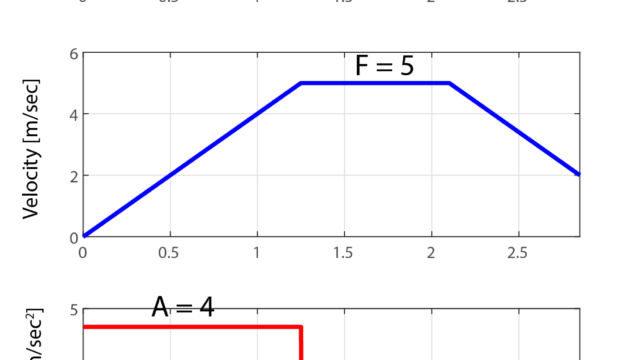 軌跡生成
軌跡生成台形速度の軌跡生成をしてロボットを制御する方法
2019-01-03 tajima Tajima Robotics
ロボットをスムーズに制御するために、台形速度プロファイルを用いた手法があります。 以前の記事では、この加速度を制限した …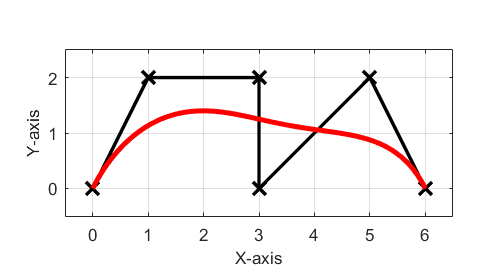 軌跡生成
軌跡生成ベジエ曲線で離散点を滑らかに補間する
2018-12-09 tajima Tajima Robotics
ベジエ曲線を用いることで、離散的な点を滑らかに補間することが出来ます。 このベジエ曲線は、Bスプライン曲線の特殊なケースであるという関係性があります。 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
