



 ロボット工学
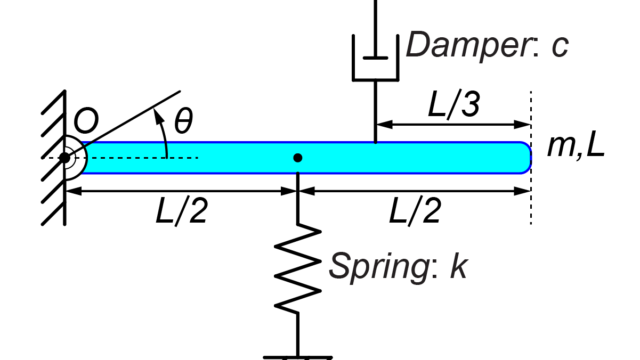
ロボット工学実際にダンパーを含んだ剛体振り子の運動方程式を算出してみる
2017-12-26 tajima Tajima Robotics
ばねとダンパーが付いている棒からなる質量-ばね-ダンパーモデルについて、実際にシステムの運動方程式を求めていきます。 …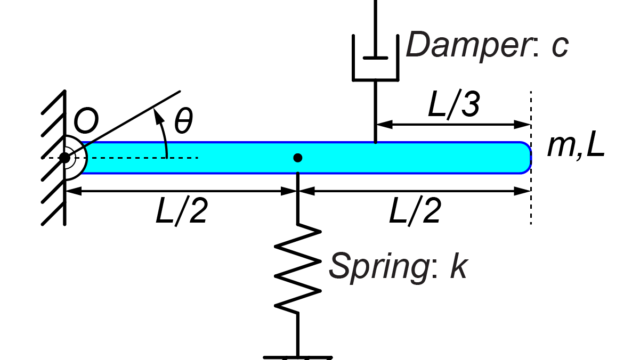 ロボット工学
ロボット工学ラグランジュ方程式を用いてダンパーを含んだ剛体振り子の運動方程式を算出する
2017-12-25 tajima Tajima Robotics
質量とばね、ダンパーからなるモデルについて、各エネルギーからラグランジュ方程式を用いてシステムの運動方程式を求める方法を紹介します。 …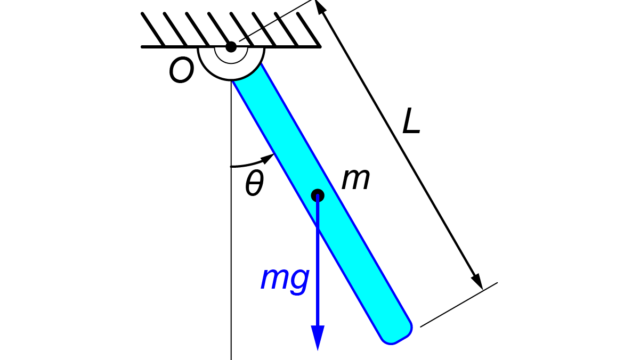 ロボット工学
ロボット工学剛体振り子の運動方程式を算出する
2017-12-24 tajima Tajima Robotics
剛体振り子(Physical Pendulum)の運動方程式を求める方法を紹介します。 今回は、システムのエネルギーからラグランジュ方程式を用いた方法で運動方 …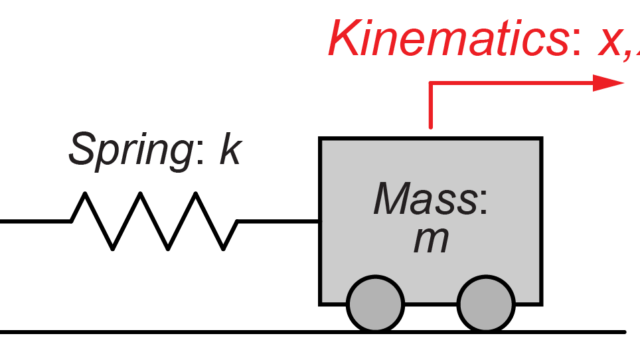 ロボット工学
ロボット工学ラグランジュ方程式を用いてシステムのエネルギーから運動方程式を求める
2017-12-23 tajima Tajima Robotics
今回はシステムの運動方程式をニュートンの運動方程式以外の方法で求める方法を紹介します。 算出方法は異なりますが、求めた …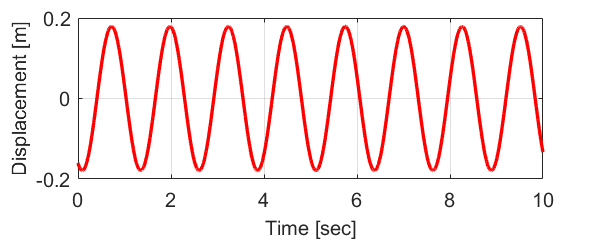 ロボット工学
ロボット工学実際に入力あり質量-ばね-ダンパーモデルの運動を計算する
2017-12-22 tajima Tajima Robotics
今回は、実際に質量-ばね-ダンパーシステムを用いて、入力として力が質量にかかっている場合のシステムの運動を計算していきたいと思います … ロボット工学
ロボット工学入力ありの質量-ばね-ダンパーモデルの運動を求める
2017-12-21 tajima Tajima Robotics
今回は、質量-ばね-ダンパーモデルを用いて、入力として力が質量に与えられている場合のシステムの運動を考えます。 入力が …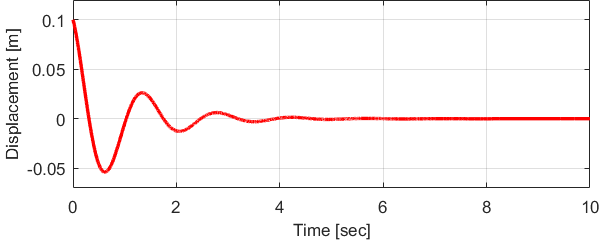 ロボット工学
ロボット工学実際に質量-ばね-ダンパーシステムの運動を計算する
2017-12-20 tajima Tajima Robotics
今回は質量-ばね-ダンパーシステムについて、例を用いて実際に値を計算していきたいと思います。 質量-ばね-ダンパーシス … ロボット工学質量-ばね-ダンパーシステムの運動を求める
2017-12-19 tajima Tajima Robotics
今回は質量-ばね-ダンパーシステム(Damped Mass Spring System)を用いて、モデルの振動(運動)について考えていきたいと思います。 シン …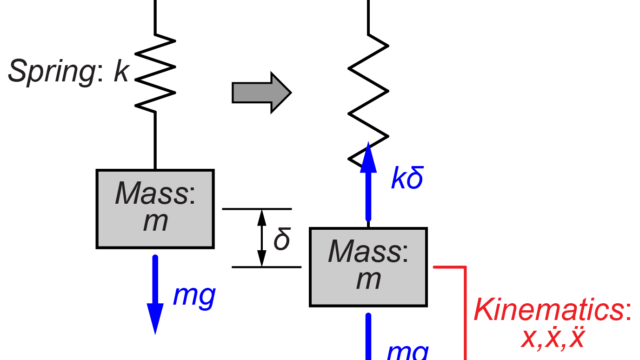 ロボット工学
ロボット工学鉛直方向の質量-ばねシステムの振動を求める
2017-12-18 tajima Tajima Robotics
前回は横向き(水平方向)の質力-ばねシステムの振動について紹介しました。 https://tajimarobotics.com/mass-spring-vibrati … ロボット工学質量-ばねシステムの振動を求める
2017-12-17 tajima Tajima Robotics
今回はシンプルな質量-ばねシステム(Mass Spring System)を用いて、このモデルの振動について算出していきたいと思います。 質量-ばねシステムの運動 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
