



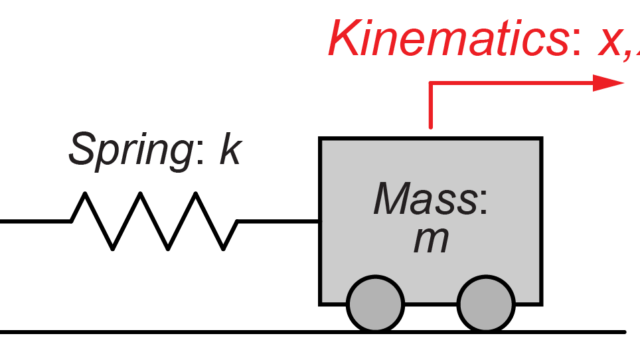
質量とばね、ダンパーからなるモデルについて、各エネルギーからラグランジュ方程式を用いてシステムの運動方程式を求める方法を紹介します。
この方法で求めた運動方程式は、ニュートンの運動の法則を用いた方法と同じになります。
ニュートンの運動の法則を用いたシステムの運動方程式の求め方は、こちらの記事を参考にしてください。

2020年5月11日 記事訂正
ダンパーによるエネルギーの損失の箇所を修正しました。
質量-ばね-ダンパーモデル
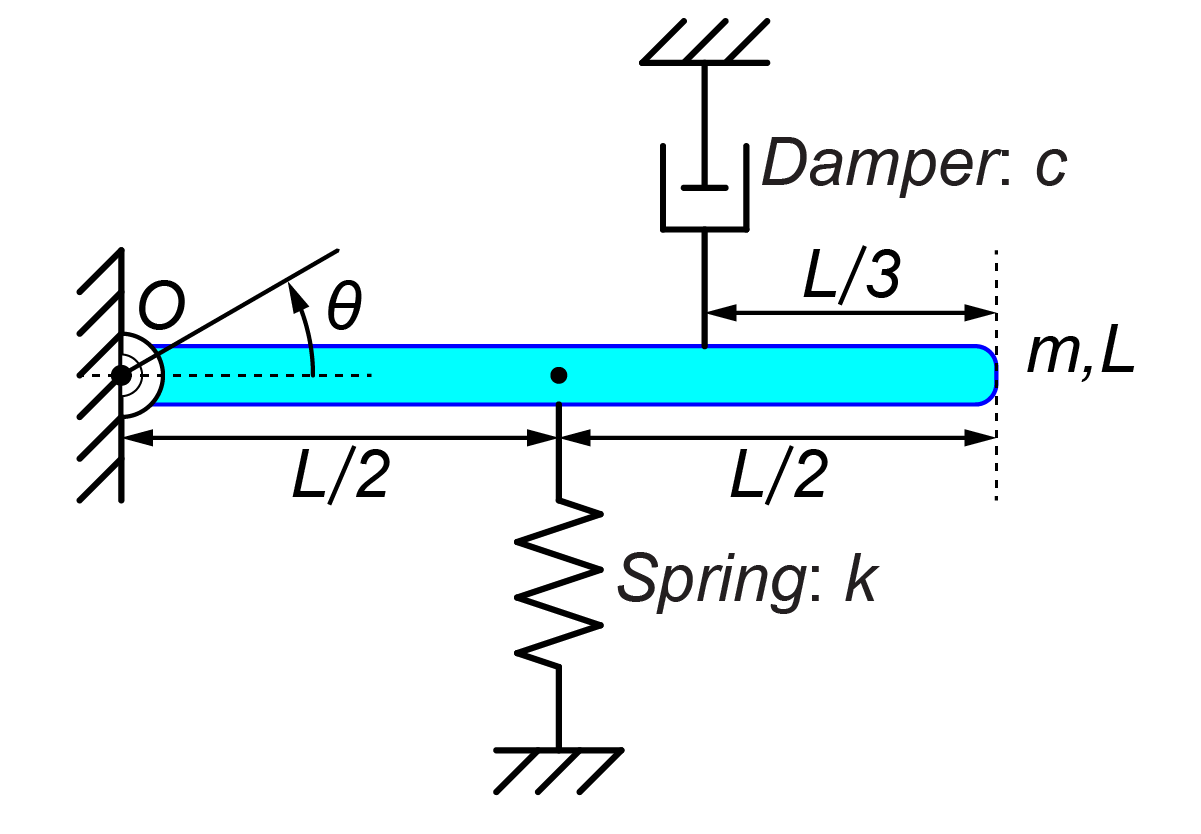
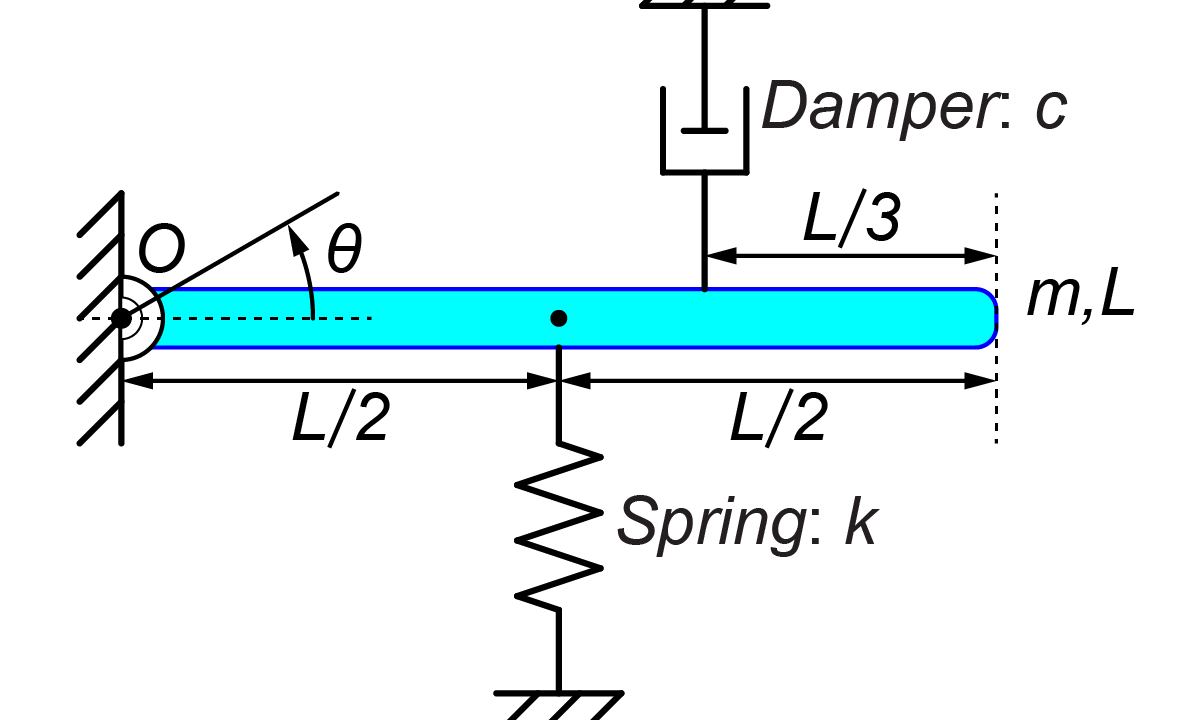
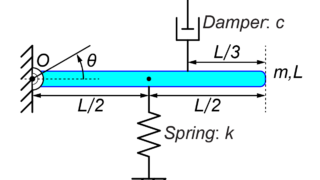
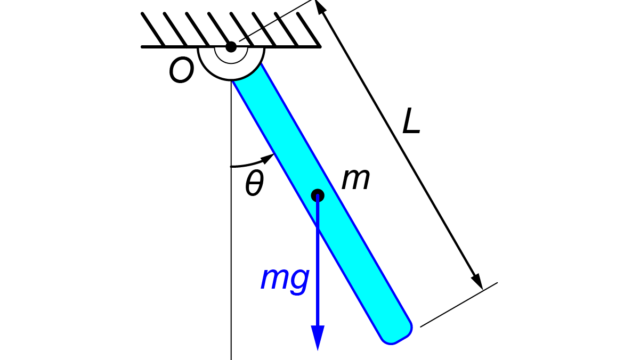
今回は、図のような棒状の長さ\(L\)の質量\(m\)が端点\(O\)で壁に接続され、その質量にばね\(k\)とダンパー\(c\)がついているモデルを扱います。
初期位置\(\theta_0\)で静かに棒を離したときに、どの様にシステムが運動するかを運動方程式を用いて考えます。
この運動方程式を用いることで、棒が時刻の経過によってどう振動していくかを求めることが出来ます。
各エネルギーと運動方程式の関係
エネルギー保存の法則とラグランジュ方程式を用いて、運動エネルギー(\(KE\))と位置エネルギー(\(PE\))が与えられた時のシステムの運動方程式は、
$$ \frac{d}{dt} \left( \frac{\partial}{\partial \dot{x}} KE \right) + \frac{\partial}{\partial x} PE = 0$$
という関係式で表すことが出来ます。
詳しくは、こちらの記事を参考にしてください。

この式にダンパーによる影響を追加することで、質量-ばね-ダンパーシステムの運動方程式を求めていきます。
ダンパーによるエネルギーの損失と散逸関数
ダンパーにより損失するエネルギーを考慮し、この影響を踏まえて運動方程式を求めます。
ダンパーによる損失エネルギーは、速度\(\dot{x}\)の2乗に比例します。
ラグランジュ方程式にダンパーによるエネルギーの損失を考慮する場合は、散逸関数(Dissipation Function)を用います。
ダンパーの散逸関数(\(R_{NC}\))は、
$$ R_{NC} = \frac{1}{2} c \dot{x}^2 $$
と表すことが出来ます。
今回のモデルの場合、この散逸関数はダンパーによってシステムがエネルギーを散逸する速度の半分になります。
ダンパーによるエネルギーの損失を考慮した運動方程式
先ほど求めたダンパーの散逸関数
$$ R_{NC} = \frac{1}{2} c \dot{x}^2 $$
を先のエネルギーと運動方程式の関係式
$$ \frac{d}{dt} \left( \frac{\partial}{\partial \dot{x}} KE \right) + \frac{\partial}{\partial x} PE = 0$$
に組み込みます。
ラグランジュ方程式にダンパーの散逸関数(\(R_{NC}\))を考慮すると、
$$ \frac{d}{dt} \left( \frac{\partial}{\partial \dot{x}} KE \right) + \frac{\partial}{\partial \dot{x}} R_{NC} + \frac{\partial}{\partial x} PE = 0$$
となります。
この式を解くことでダンパーを含んだ運動方程式を求めることが出来ます。
まとめ
今回は、ばねとダンパーを含んだシステムの運動方程式を各エネルギーとラグランジュ方程式を用いて求める方法を紹介しました。
次回は、例として挙げた図のモデルについて、実際にシステムの運動を求めていきたいと思います。



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+

ダンパーのエネルギー損失についてご教授ください。
ある参考書ではダンパーのエネルギー損失はエネルギー保存の観点から導出すると∮cv^2dtと書いてありました。
上記計算では1/2CV^2とされています。
おそらく本質は同じ事を言っているのだと思いますが、係数である1/2や式が異なる理由がわかりません。ダンパーの損失の考え方についてご教授頂けないでしょうか。
お手数お掛けしますがよろしくお願いいたします。
コメントありがとうございます。
ご指摘いただいた本記事内で紹介している1/2CV^2は、ダンパーのエネルギー損失を直接表しているものではなく、正しくは散逸関数(Dissipation Function)を表しています。
本記事で取り扱っているシステムの場合、この散逸関数はダンパーによってシステムがエネルギーを散逸(損失)させる速度の半分となります。
記事中での説明や語句の使用が正確でなかったため、記事中の文章を修正いたします。
ご指摘いただき、ありがとうございました。
今後ともどうぞよろしくお願いします。