



MIMO系の状態空間モデル(状態方程式)から伝達関数を求める方法を紹介します。
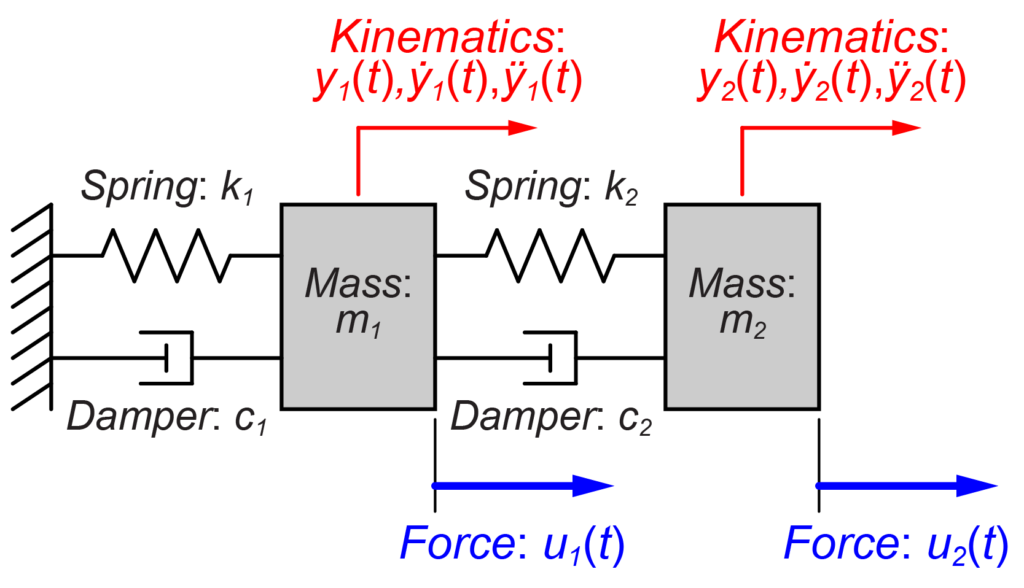
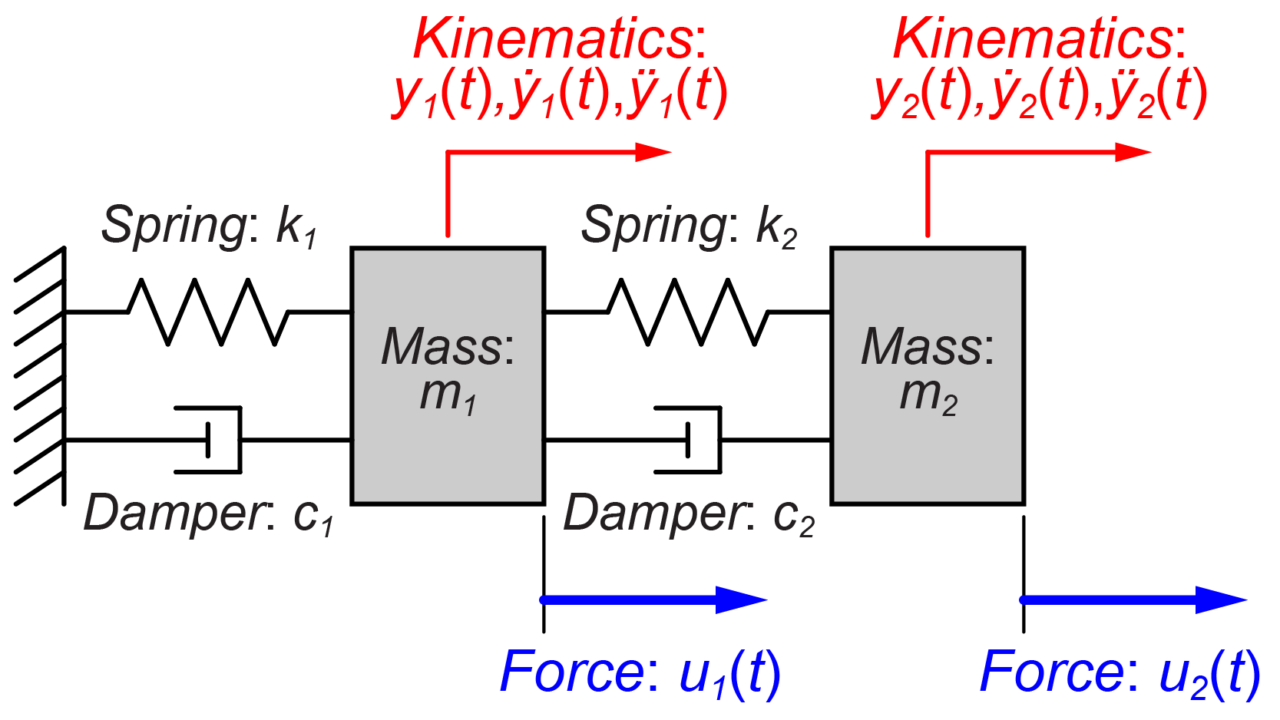
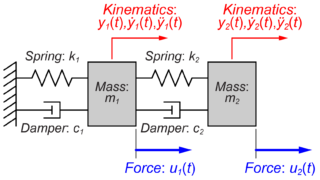
今回もMIMOシステムの例として2質量系モデルを扱います。
このMIMO系モデルの状態空間モデルについては、こちらの記事を参考にしてください。
このモデルの伝達関数をラプラス変換を用いて求める方法は、こちらの記事を参考にしてください。
状態空間モデルと伝達関数の関係
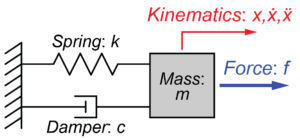
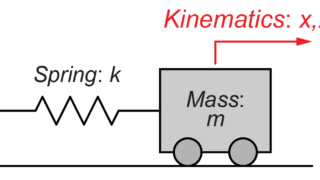
以前の記事で、SISO系の質量-ばね-ダンパーシステムについて、状態空間モデルと伝達関数は、
$$ G(s) = \frac{Y(s)}{U(s)} = \boldsymbol{ C } \left( s \boldsymbol{ I } – \boldsymbol{ A } \right)^{-1} \boldsymbol{ B } + D $$
と表すことが出来ると紹介しました。
このSISO系で用いた関係式はMIMO系でも同様に用いることが出来ます。
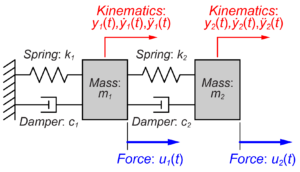
今回扱っている2質量システムの状態空間モデルの各行列は、
$$ \boldsymbol{A} = \begin{bmatrix} 0 & 1 & 0 & 0 \\ – \frac{k_1+k_2}{m_1} & – \frac{c_1+c_2}{m_1} & \frac{k_2}{m_1} & \frac{c_2}{m_1} \\ 0 & 0 & 0 & 1 \\ \frac{k_2}{m_2} & \frac{c_2}{m_2} & – \frac{k_2}{m_2} & – \frac{c_2}{m_2} \end{bmatrix} $$
$$ \boldsymbol{B} = \begin{bmatrix} 0 & 0 \\ \frac{1}{m_1} & 0 \\ 0 & 0 \\ 0 & \frac{1}{m_2} \end{bmatrix} $$
$$ \boldsymbol{C} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} $$
$$ \boldsymbol{D} = \begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix} $$
となります。
今回の2質量モデルは、2入力2出力システムなので、算出した伝達関数は\(2 \times 2\)の行列になります。
状態空間モデルから伝達関数の算出
実際に値を入れて計算していきます。
$$ \boldsymbol{G(s)} = \frac{\boldsymbol{Y(s)}}{\boldsymbol{U(s)}} = \boldsymbol{ C } \left( s \boldsymbol{ I } – \boldsymbol{ A } \right)^{-1} \boldsymbol{ B } + \boldsymbol{ D } $$
$$ = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \left( s \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} – \begin{bmatrix} 0 & 1 & 0 & 0 \\ – \frac{k_1+k_2}{m_1} & – \frac{c_1+c_2}{m_1} & \frac{k_2}{m_1} & \frac{c_2}{m_1} \\ 0 & 0 & 0 & 1 \\ \frac{k_2}{m_2} & \frac{c_2}{m_2} & – \frac{k_2}{m_2} & – \frac{c_2}{m_2} \end{bmatrix} \right)^{-1} \begin{bmatrix} 0 & 0 \\ \frac{1}{m_1} & 0 \\ 0 & 0 \\ 0 & \frac{1}{m_2} \end{bmatrix} + \begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix} $$
$$ = \begin{bmatrix} \frac{m_2 s^2 + c_2 s + k_2}{ \left( m_1 s^2 + c_1 s + k_1 \right) \left( m_2 s^2 + c_2 s + k_2 \right) + m_2 s^2 \left( c_2 s + k_2 \right) } & \frac{c_2 s + k_2}{ \left( m_1 s^2 + c_1 s + k_1 \right) \left( m_2 s^2 + c_2 s + k_2 \right) + m_2 s^2 \left( c_2 s + k_2 \right) } \\ \frac{c_2 s + k_2}{ \left( m_1 s^2 + c_1 s + k_1 \right) \left( m_2 s^2 + c_2 s + k_2 \right) + m_2 s^2 \left( c_2 s + k_2 \right) } & \frac{m_1 s^2 + \left(c_1+c_2\right) s + \left(k_1+k_2\right)}{ \left( m_1 s^2 + c_1 s + k_1 \right) \left( m_2 s^2 + c_2 s + k_2 \right) + m_2 s^2 \left( c_2 s + k_2 \right) } \end{bmatrix} $$
この伝達関数行列は、以前の記事でラプラス変換から導出した場合との同じになります。
まとめ
今回は状態空間モデル(状態方程式)から伝達関数を求める方法を紹介しました。
すでに状態空間モデルが分かっている場合には、システムの伝達関数は行列計算で求めることが出来ます。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
