



ロボットを用いて様々な作業を行うことが可能になります。
これらの作業を正確に行うためには、ロボットを正確に制御する必要があります。
その正確な制御を実現するためには、ロボットの機構や運動を正確に数式で表す必要があります。
今回の記事では、ロボットの機構や運動を求める方法として、運動学、静力学、動力学について紹介します。
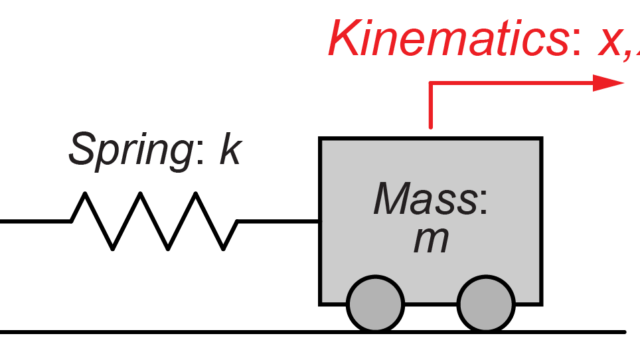
運動学とは
運動学とは、
ロボットの関節状態(角度や変位)と手先状態(位置や姿勢)の関係を数式で表したもの
です。
運動学には、関節状態から手先状態を求める順運動学と手先状態から関節状態を求める逆運動学があります。
運動学を用いることで、ロボットの関節を変化させた時、どれくらいロボットの手先の状態が変化するかが分かります。
運動学については、こちらの記事も参考にしてください。

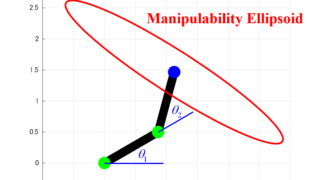
静力学とは
静力学とは、
静止状態におけるロボットの手先の力と関節の駆動力との関係を数式で表したもの
です。
静力学を用いることで、ロボットの手先が接している対象にどれくらいの力を加えているかを求めることが出来ます。
また、手先に任意の力を与えるために、どれくらいの関節駆動力が必要かも分かります。
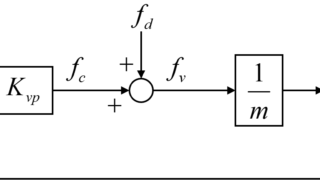
動力学とは
動力学とは、
ロボットが動作している中での関節駆動力と関節状態の関係を数式で表したもの
です。
動力学を用いることで、目標となる関節軌跡(位置、速度、加速度)を実現するために必要な、関節駆動力を求めることが出来ます。
また、動力学ではロボットの手先状態(位置や姿勢)と手先の力の関係を表すことも出来ます。
3つの関係は
ロボットの運動学、静力学、動力学の3つの関係を表すと下の図のようになります。

まとめ
今回の記事では、ロボットの制御に必要となるロボットの運動学、静力学、動力学について簡単に説明しました。
また、これら3つの手法の関係図も紹介しました。
これらロボットの運動学、静力学、動力学を用いることで、ロボットの状態を数式で表現することが可能となり、その結果ロボットの正確な制御を実現することが出来ます。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
