



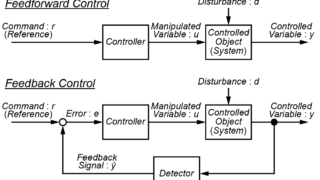
前回の記事から引き続き、PID制御を用いたフィードバックシステムについて、システムが安定性を保てる各ゲインの選定範囲を算出する方法を紹介します。
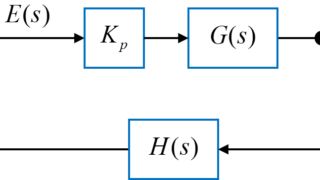
前回の記事では、P制御を例に制御系内の比例ゲインをシステムが安定になるように制御する方法を紹介しました。
今回は、PI制御を例に制御系内に含まれる2つのゲインをシステムが安定性を保てるように選択する方法を紹介していきます。
PI制御とは
PI制御とは、制御システムの出力値\(y\)と目標値\(r\)との偏差\(e\)について、P制御で用いた比例ゲイン\(K_p\)に加えて積分ゲイン\(K_i\)を用いて行うフィードバック制御の事です。
出力値\(y(t)\)と目標値\(r(t)\)より求められる、時刻\(t\)での偏差\(e(t)\)
$$ e(t) = r(t) – y(t)$$
を用いて、この偏差\(e(t)\)の時間積分に積分ゲイン\(K_i\)を掛け合わせることで、I制御を行います。
PI制御を用いた場合のシステムへの入力信号は、偏差\(e(t)\)と各ゲイン(\(K_p\)と\(K_i\))より、
$$ u(t) = K_p e(t) + K_i \displaystyle \int_{0}^{t} e (\tau) d\tau $$
で表すことが出来ます。
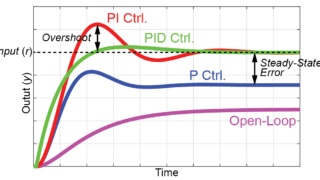
P制御の場合と同様に、PI制御内の各ゲイン(\(K_p\)と\(K_i\))が大きいほど目標に近づく時間が短くなりますが、システムが不安定になる可能性もあります。
制御システムが安定性を保てる範囲でPI制御の各ゲインを選択するために、ラウス・フルビッツの安定判別法を用いて、制御系内の比例ゲイン\(K_p\)と積分ゲイン\(K_i\)が選択できる範囲を算出していきます。
使用するモデルと伝達関数
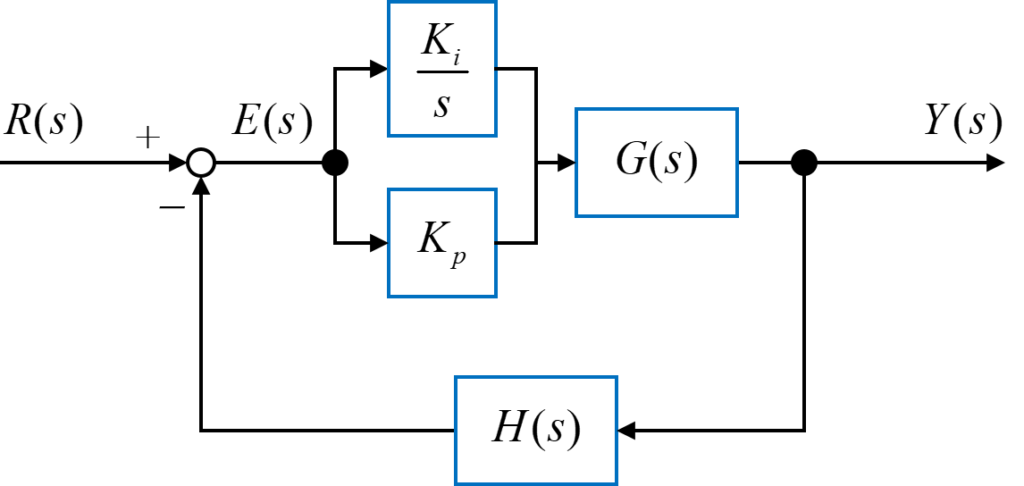
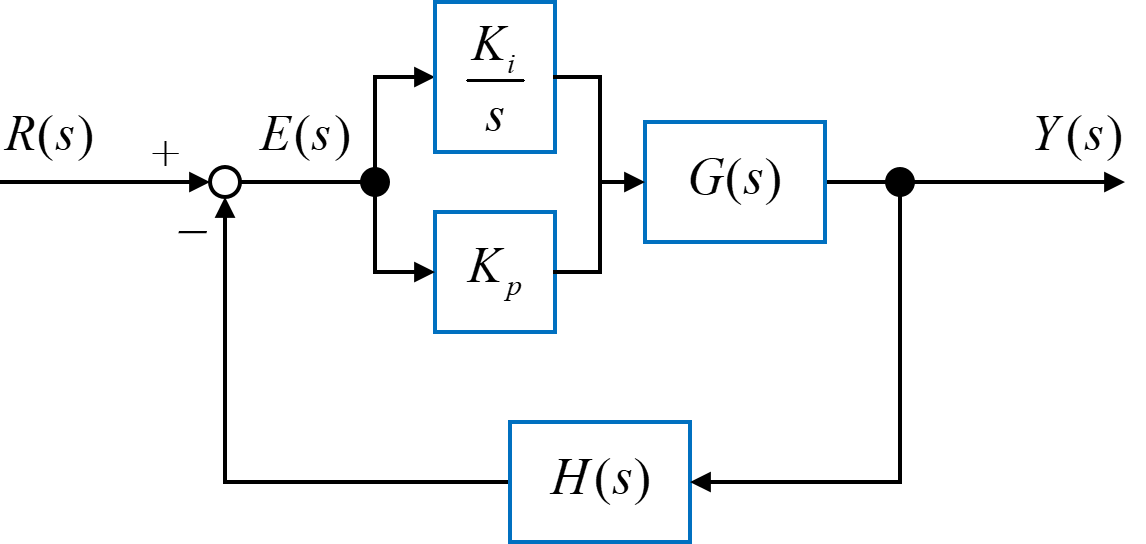
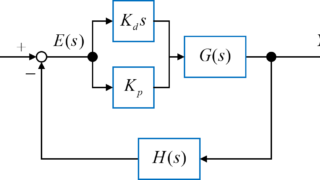
今回は、図のようなフィードバックシステムを用いて、比例ゲイン\(K_p\)と積分ゲイン\(K_i\)を用いたPI制御を行います。
PI制御を行う制御対象\(G(s)\)は、
$$ G(s) = \frac{{K \omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} $$
という2次系のシステムを用います。
ここで、\(\omega_n\)は固有角周波数、\(\zeta\)は減衰比を表しています。
また、\(K\)は制御対象内のゲインを示しています。
今回は
$$ H(s) = 1 $$
とします。
この制御対象\(G(s)\)とPI制御の比例ゲイン\(K_p\)と積分ゲイン\(K_i\)によるフィードバックシステム全体の伝達関数\(T(s)\)は、
$$ T(s) = \frac{\left(K_p + \frac{K_i}{s} \right) \frac{K {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} }{1 + \left(K_p + \frac{K_i}{s} \right) \frac{K {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} } $$
$$ = \frac{\left(K_p + \frac{K_i}{s} \right) {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2 + \left(K_p + \frac{K_i}{s} \right) K {\omega_n}^2} $$
と算出することが出来ます。
この算出したフィードバックシステム全体の伝達関数\(T(s)\)について、ラウス・フルビッツの安定判別法を用いて、システムを安定に制御することが出来る各ゲイン(比例ゲイン\(K_p\)と積分ゲイン\(K_i\))の範囲を求めていきます。
比例・積分ゲインとシステムの安定性
先程算出したフィードバックシステム全体の伝達関数
$$ T(s) = \frac{\left(K_p + \frac{K_i}{s} \right) {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2 + \left(K_p + \frac{K_i}{s} \right) K {\omega_n}^2} $$
から、ラウス・フルビッツの安定判別法を用いるために特性方程式\(D(s)\)を求めます。

特性方程式\(D(s)\)は、伝達関数\(T(s)\)の分母にあたるため、
$$ D(s) = s^2 + 2 \zeta \omega_n s + {\omega_n}^2 + \left(K_p + \frac{K_i}{s} \right) K {\omega_n}^2 $$
で表すことが出来ます。
この特性方程式\(D(s)\)を多項式の形
$$ a_n s^n+a_{n-1} s^{n-1}+ \cdots + a_1 s^1 + a_0 s^0 $$
で書き直すと
$$ D(s) = s^3 + 2 \zeta \omega_n s^2 + \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) s + K_i K {\omega_n}^2 $$
と変換できます。
変換した特性方程式\(D(s)\)に対して、ラウス・フルビッツの安定判別法を用いるためにラウス配列を求めていきます。
$$ \begin{eqnarray} \begin{array}{c|ccc} s^3 & 1 & {\omega_n}^2 + K_p K {\omega_n}^2 & 0 \\ s^2 & 2 \zeta \omega_n & K_i K {\omega_n}^2 & 0 \\ s^1 & \frac{2 \zeta \omega_n \cdot \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) – 1 \cdot K_i K {\omega_n}^2}{2 \zeta \omega_n} & 0 & \\ s^0 & K_i K {\omega_n}^2 & & \\ \end{array} \end{eqnarray} $$
求めたラウス配列の第一列より、
$$ \left[ 1, 2 \zeta \omega_n, \frac{2 \zeta \omega_n \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) – K_i K {\omega_n}^2}{2 \zeta \omega_n} , K_i K {\omega_n}^2 \right] $$
の数列を抽出します。
この数列内の全ての要素の符号が一致していればシステムは安定なので、
$$ \frac{2 \zeta \omega_n \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) – K_i K {\omega_n}^2}{2 \zeta \omega_n} > 0 $$
$$ K_i K {\omega_n}^2 > 0 $$
であればシステムは安定性を保つことが出来ると言えます。
2つ目の不等式から積分ゲイン\(K_i\)が、
$$ K_i K {\omega_n}^2 > 0 $$
$$ \Rightarrow K_i > 0 $$
と正(\(+\))である必要があることが分かります。
次に、1つ目の不等式から比例ゲイン\(K_p\)と積分ゲイン\(K_i\)について、
$$ \frac{2 \zeta \omega_n \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) – K_i K {\omega_n}^2}{2 \zeta \omega_n} > 0 $$
$$ \Rightarrow 2 \zeta \omega_n \left( {\omega_n}^2 + K_p K {\omega_n}^2 \right) – K_i K {\omega_n}^2 > 0 $$
$$ \Rightarrow 2 \zeta \omega_n \left( 1 + K_p K \right) > K_i K $$
$$ \Rightarrow 1 + K_p K > \frac{K_i K}{2 \zeta \omega_n} $$
$$ \Rightarrow K_p K > \frac{K_i K}{2 \zeta \omega_n} – 1 $$
$$ \Rightarrow K_p > \frac{K_i}{2 \zeta \omega_n} – \frac{1}{K} $$
の関係式が導かれます。
よって、PI制御系内の比例ゲイン\(K_p\)と積分ゲイン\(K_i\)が
$$ K_i > 0 $$
$$ K_p > \frac{K_i}{2 \zeta \omega_n} – \frac{1}{K} $$
であれば、システムは安定になると言えます。
つまり、この2つの関係式内の範囲で各ゲインを選択すれば、制御系が不安定になって出力が発散することはありません。
まとめ
今回は、PI制御を用いてロボットなどのシステムを安定に制御するために、比例ゲインと積分ゲインを選択出来る範囲を求める方法を紹介しました。
次回は、PD制御を用いた同様のフィードバックシステムを安定に制御出来る各ゲインの範囲を算出する方法を紹介していきたいと思います。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
