


 制御工学
制御工学システムの安定性をボード線図の安定余裕から確認する方法
2018-12-25 tajima Tajima Robotics
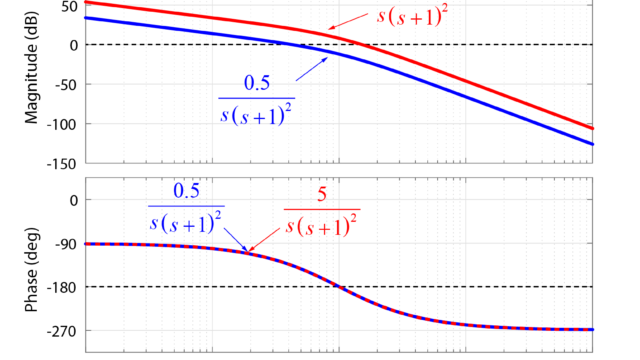
制御システムの安定性をボード線図を用いて判別する方法を紹介しています。 前回の記事では、開ループ系のボード線図からゲイ …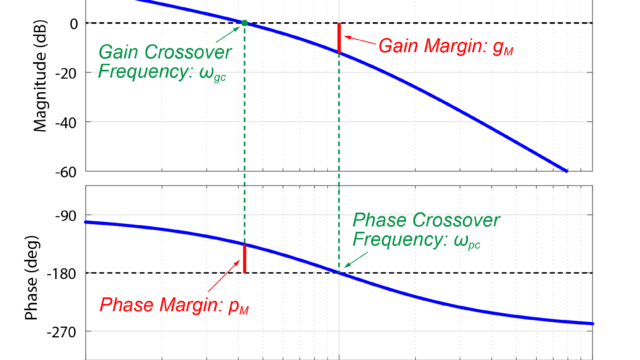 制御工学
制御工学ボード線図の位相余裕とゲイン余裕から安定性を確認する方法
2018-12-23 tajima Tajima Robotics
あるシステムを制御する際に、そのシステムが安定か不安定かを事前に確認することは、とても重要です。 システムが不安定の場 …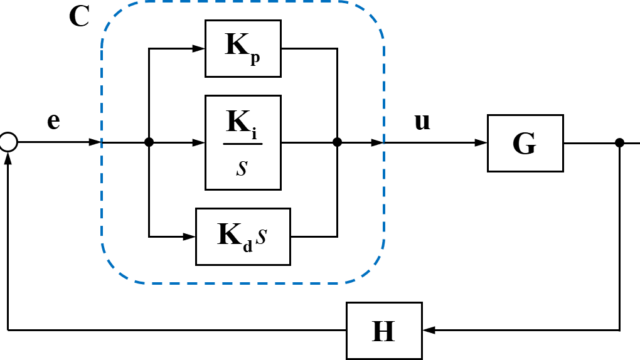 制御工学
制御工学PID制御のブロック線図と伝達関数を表す方法
2018-12-21 tajima Tajima Robotics
今回の記事では、 制御の世界で広く用いられているPID制御(PID Controller)について説明し、PID制御を用いたフィードバック制御をブロック線図(Block D …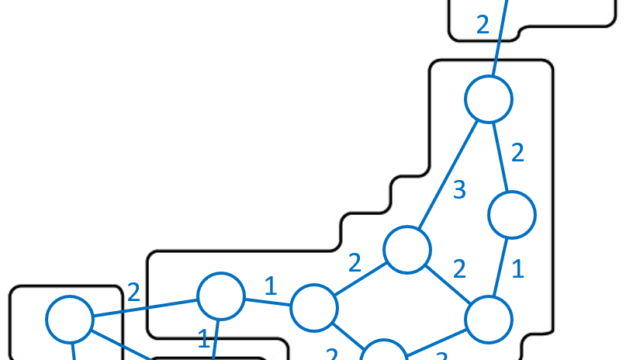 経路探索
経路探索グラフ理論と経路探索するアルゴリズムの紹介
2018-12-18 tajima Tajima Robotics
日常的にGoogleマップや乗り換えアプリなどで経路探索を行う方は多いと思います。 これらの技術によって、僕たちは最適な道順を選んだり、目的地に早く着けたりす …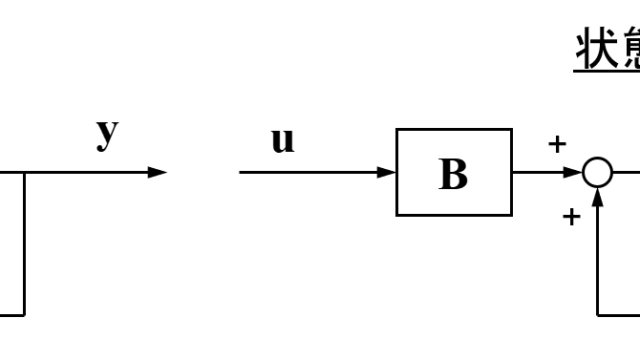 制御工学
制御工学状態フィードバックの状態方程式をブロック線図で表す
2018-12-13 tajima Tajima Robotics
システムの制御を行う際に、システムの状態をフィードバックして行う制御方があります。 以前の記事で紹介した台車型倒立振子 …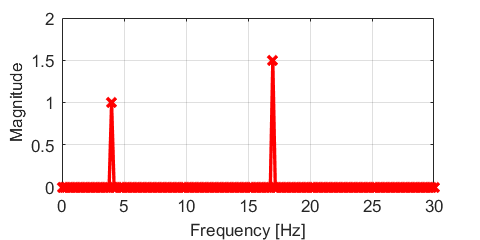 ロボット技術
ロボット技術フーリエ変換のプログラムを自分で作成してみた
2018-12-11 tajima Tajima Robotics
フーリエ変換を用いることで、時間による関数で与えられている信号に含まれる周波数成分を求めることが出来ます。 このフーリエ変換を行うためのプログラムは多く存在し …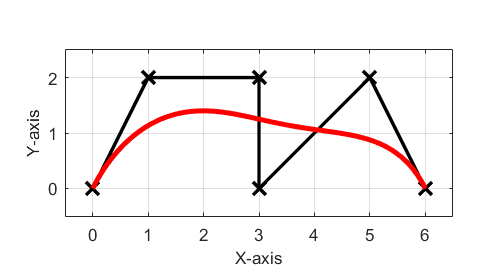 軌跡生成
軌跡生成ベジエ曲線で離散点を滑らかに補間する
2018-12-09 tajima Tajima Robotics
ベジエ曲線を用いることで、離散的な点を滑らかに補間することが出来ます。 このベジエ曲線は、Bスプライン曲線の特殊なケースであるという関係性があります。 …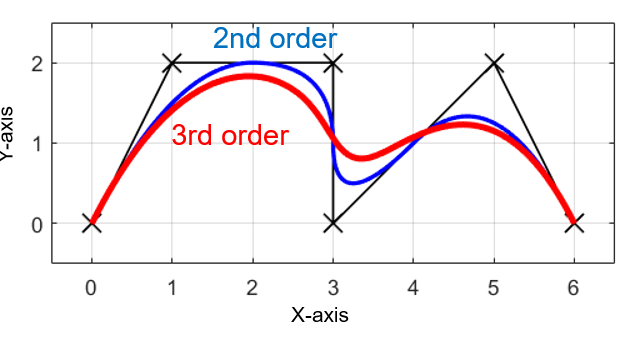 軌跡生成
軌跡生成Bスプライン曲線で離散点を補間するプログラムを解説してみる
2018-12-08 tajima Tajima Robotics
Bスプライン曲線を用いることで、離散的な点で与えられた指令を補間して、スムーズな曲線を作成することが出来ます。 https:/ … ロボット工学
ロボット工学台車型倒立振子を安定にフィードバック制御する
2018-12-02 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回までの記事では、台車型倒立振子を制御するために … ロボット工学台車型倒立振子の安定性と可制御性を確認する
2018-11-13 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回の記事では、非線形関数で表された台車型倒立振子の状態方 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
