

 自動運転車
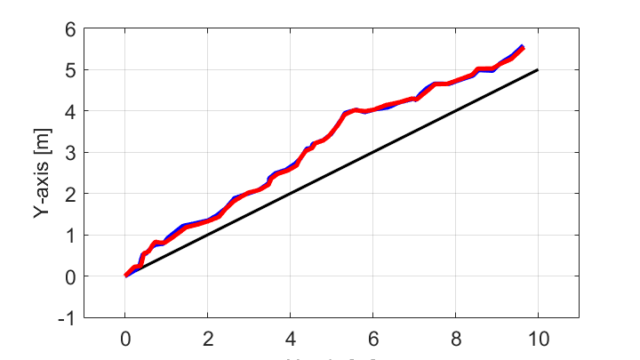
自動運転車カルマンフィルタでロボットの位置推定をしてみよう!
2018-05-30 tajima Tajima Robotics
ロボットや自動運転車を制御するときに、ロボットや車の正確な位置を知ることはとても重要です。 しかし、ロボットを制御する …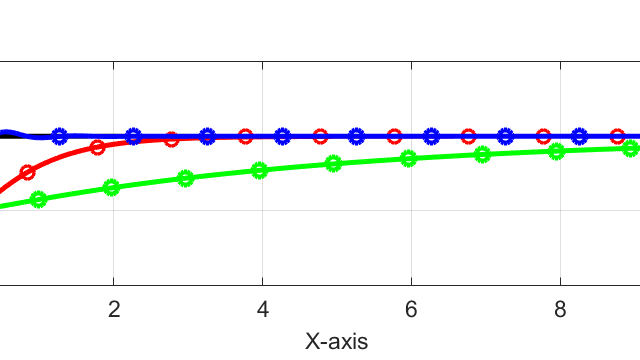 自動運転車
自動運転車自動運転車を制御してみよう:実際に簡単な制御をしてみる
2018-05-26 tajima Tajima Robotics
本シリーズは、車やロボットの自動運転を実現するために、必要となる制御工学の情報を紹介しています。 https://tajima …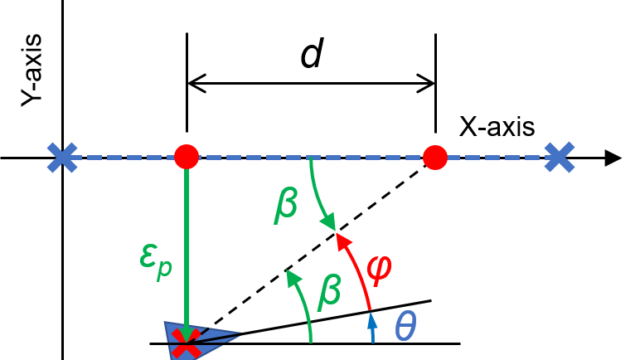 自動運転車
自動運転車自動運転車を制御してみよう:簡単な制御モデルを求める
2018-05-24 tajima Tajima Robotics
本シリーズは、実際に車やロボットの自動運転を行うために、必要な制御工学の情報を紹介しています。 https://tajimar …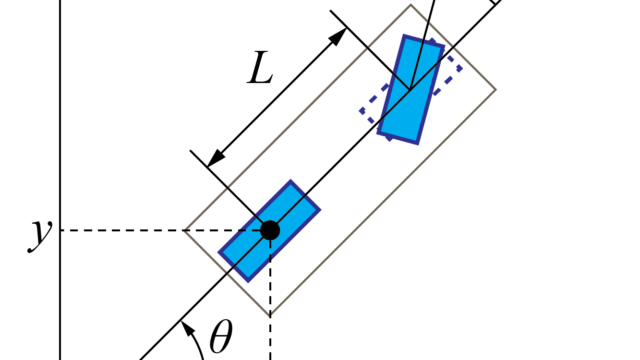 自動運転車
自動運転車自動運転車を制御してみよう:車の運動力学モデルを求める
2018-05-22 tajima Tajima Robotics
本シリーズでは、車やロボットの自動運転を実際に行うために必要となる制御工学の情報を紹介していきます。 https://taji … 自動運転車
自動運転車自動運転車を制御してみよう
2018-05-20 tajima Tajima Robotics
本シリーズでは、実際に車やロボットの自動運転を行うために必要な制御工学の情報を紹介していきます。 今回は、本シリーズで取り扱う問題と制御の全体像を紹介していき …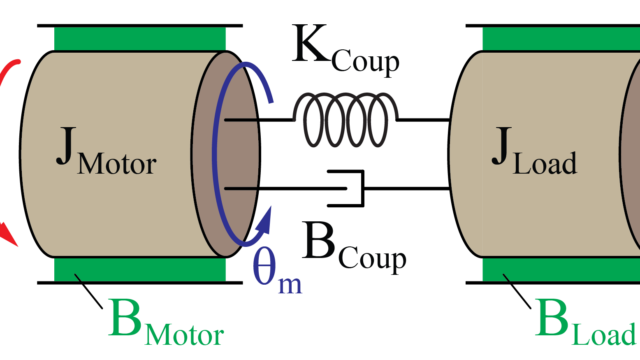 制御工学
制御工学運動方程式と伝達関数で2質量の回転運動モデルを表す
2018-05-16 tajima Tajima Robotics
回転運動をするシステムについて、実際に2質量の回転運動モデルを用いながら、運動方程式の求め方から伝達関数で表す方法まで紹介していきま …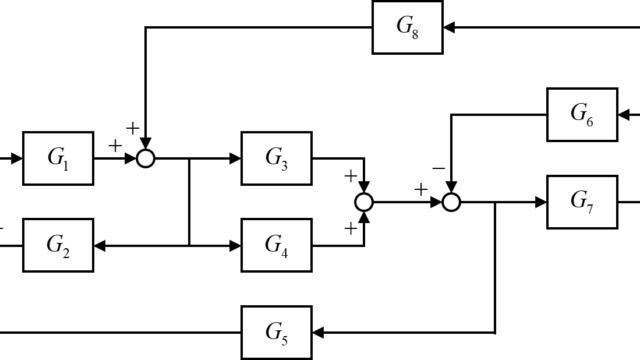 制御工学
制御工学ブロック線図を簡略化する:ブロック線図の特性を利用する方法
2018-05-12 tajima Tajima Robotics
複雑なブロック線図を1つにまとめるために、簡略化(簡単化)する方法を紹介します。 ブロック線図で表されたロボットなど制 … 制御工学
制御工学ブロック線図を簡略化する:内部信号を用いる方法(その2)
2018-05-11 tajima Tajima Robotics
前回からの続きとして、複雑なブロック線図を内部信号を用いて簡略化(簡単化)して、1つにまとめる方法を紹介しています。 … 制御工学ブロック線図を簡略化する:内部信号を用いる方法(その1)
2018-05-10 tajima Tajima Robotics
複雑なブロック線図を簡略化(簡単化)して、1つにまとめる方法を紹介します。 ロボットなど制御システムをブロック線図で表 … 制御工学
制御工学実際に伝達関数からボード線図を漸近線近似で書いてみよう(その3)
2018-05-08 tajima Tajima Robotics
伝達関数で表されたロボットや工作機械などのシステムのボード線図を書く方法を紹介しています。 前回までの記事では、システ …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
