



 制御工学
制御工学ラプラス変換を使って微分方程式を解く
2018-01-16 tajima Tajima Robotics
各時間\(t\)でのロボットの速度\(\dot{x}(t)\)や位置\(x(t)\)を求めたり、目標通りに制御するために、微分方程式(Differential Equati …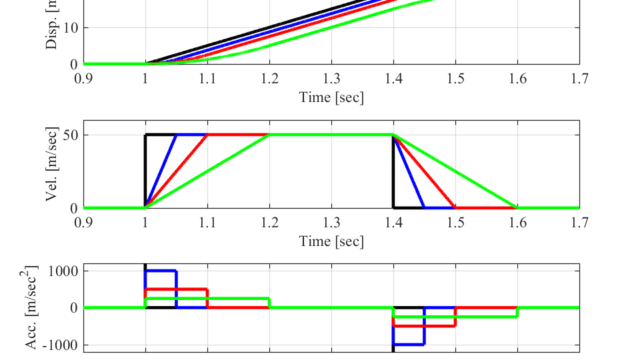 軌跡生成
軌跡生成ロボットの軌跡生成:移動平均関数を使って加減速を制御する
2018-01-15 tajima Tajima Robotics
ロボットが移動する際に加速度を考慮した軌跡生成の方法として、 指数関数型(Exponential Model)
移動 … 軌跡生成
軌跡生成ロボットの軌跡生成:指数関数を使って加減速を制御する
2018-01-14 tajima Tajima Robotics
ロボットが移動する際に加速度を考慮した軌跡生成の方法として、 指数関数型
移動平均型 の2つを前回の記事で紹介 …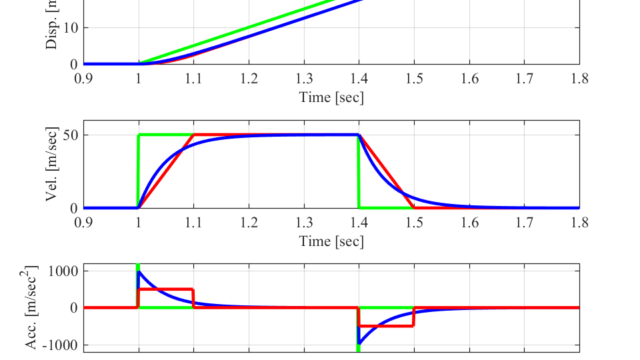 軌跡生成
軌跡生成ロボットの軌跡生成:加速度制御
2018-01-13 tajima Tajima Robotics
ロボットが移動する際の加速度を考慮した軌跡生成(Trajectory Generation)の方法を紹介します。 以前に紹介した直線補間(Linear Int …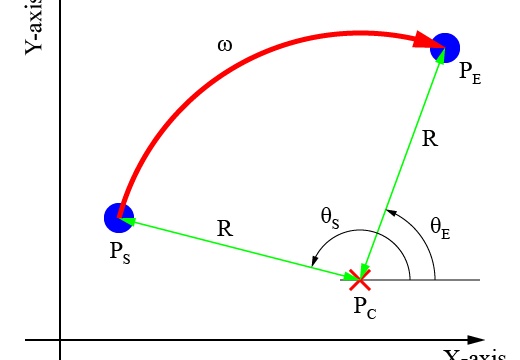 軌跡生成
軌跡生成ロボットの軌跡生成:円弧補間
2018-01-12 tajima Tajima Robotics
ロボットがXY平面上の点から他の点へ移動する軌跡生成(Trajectory Generation)の方法には、 直線補間(Linear Interpolation …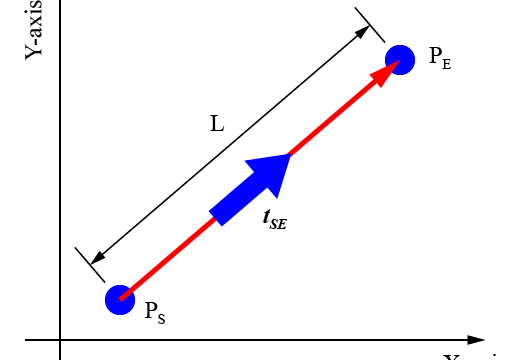 軌跡生成
軌跡生成ロボットの軌跡生成:2次元の直線補間
2018-01-11 tajima Tajima Robotics
今回は、2次元のXY平面モデルでの直線補間(Linear Interpolation)について紹介します。 1次元の直線補間については、こちらの記事を参考にし …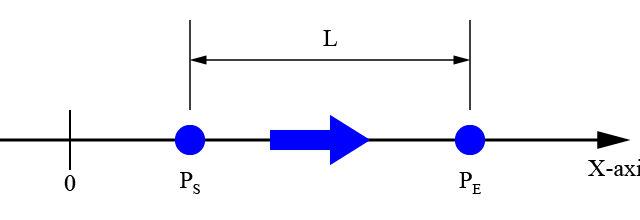 軌跡生成
軌跡生成ロボットの軌跡生成:直線補間
2018-01-10 tajima Tajima Robotics
軌跡生成(Trajectory Generation)とは、ロボットの状態(位置や姿勢)をある点から他の点に移動させるために、必要な各時間における位置および速度などの情報を … ロボット工学
ロボット工学モード解析を使って2質量システムの運動を求める:その3
2018-01-09 tajima Tajima Robotics
モード解析(Modal Analysis)を用いることで、システムがどのように振動するかを求めることが出来ます。 前回 …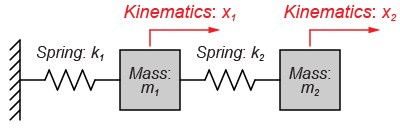 ロボット工学
ロボット工学モード解析を使って2質量システムの運動を求める:その2
2018-01-07 tajima Tajima Robotics
モード解析(Modal Analysis)を用いることで、システムがどのように振動するかを求めることが出来ます。 前回 … ロボット工学モード解析を使って2質量システムの運動を求める
2018-01-06 tajima Tajima Robotics
システムがどのように振動するかを求める方法にモード解析(Modal Analysis)があります。 2質量システムを例 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
