



 制御工学
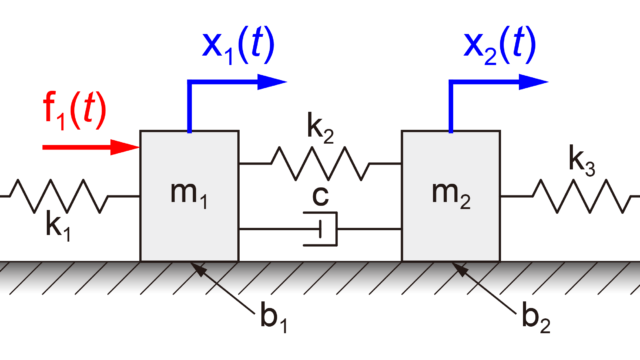
制御工学摩擦を含んだ2質量系の伝達関数を求める:運動方程式のラプラス変換から導出
2020-06-02 tajima Tajima Robotics
制御工学において、運動方程式や伝達関数の導出はとても重要な項目です。 これら運動方程式と伝達関数の導出方法を身に着ける … 制御工学摩擦を含んだ2質量系の運動方程式を求める方法
2020-06-01 tajima Tajima Robotics
システムの運動方程式や伝達関数の導出は、制御工学においての基本であり、とても重要です。 この運動方程式や伝達関数の算出方法を身につけるためには、いろいろなパタ … 軌跡生成
軌跡生成軌跡を生成するための基本的な関数の紹介
2020-05-24 tajima Tajima Robotics
ロボットや工作機械を指令値通りに滑らかに制御する際、滑らかな軌跡の生成は重要な要素の1つになります。 滑らかな軌跡を生成する方法として、様々な関数が用いられています。 … 軌跡生成1次元や多次元の軌跡生成と注意点
2020-05-20 tajima Tajima Robotics
ロボットや工作機械の軌跡を生成する際には、様々な要素を考慮する必要があります。 例えば、アクチュエータの最大速度や加速度、最大トルクなどです。 加えて、 … 軌跡生成機械カムと電子カムとは?機械カムが電子カムに置き換わる
2020-05-18 tajima Tajima Robotics
アクチュエータによる動作の方向を変える働きを持つ機械要素としてカムがあります。 カムには、機械カムと電子カムの2種類があります … 軌跡生成
軌跡生成離散点補間と関数近似による軌跡生成と比較
2020-05-16 tajima Tajima Robotics
ロボットを高速かつ高精度に制御するためには、離散的な指令点から連続する滑らかな軌跡を生成する必要があります。 https://tajimarobotics.com/overv …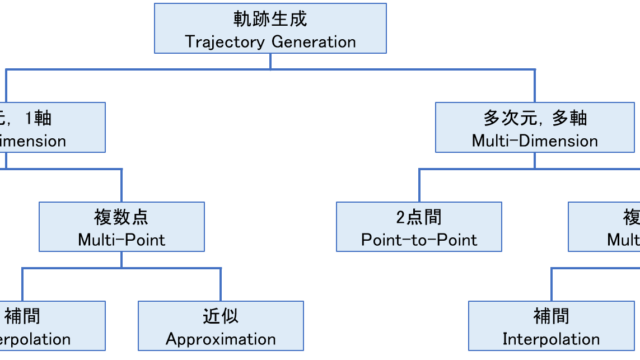 軌跡生成
軌跡生成軌跡生成の基本知識とカテゴリー分け
2020-05-13 tajima Tajima Robotics
ロボットや工作機械を滑らかに動作させるためには、滑らかな軌跡な生成が重要になります。 今回の記事では、この軌跡生成について全体像や基本知識について紹介します。 …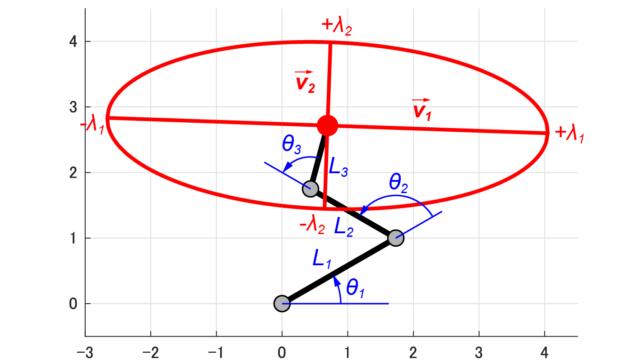 ロボット技術
ロボット技術3リンクロボットアームの可操作性楕円体を求めるMATLABプログラム
2020-05-05 tajima Tajima Robotics
ロボットの動かしやすさを表す方法として、可操作性楕円体があります。 https://tajimarobotics.com/ma … ロボット技術3リンクロボットアームの可操作性楕円体を算出する
2020-04-18 tajima Tajima Robotics
可操作性楕円体を用いることで、ロボットがどの方向に動かしやすい状態かを可視化することが出来ます。 https://tajima … ロボット技術
ロボット技術3リンクロボットアームの可操作性楕円体を求める方法を紹介する
2020-04-15 tajima Tajima Robotics
ロボットの動かしやすさを合わす指標として、可操作性楕円体があります。 これまでの記事では、2リンクロボットアームの可操 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
