



ロボットや工作機械などの動的システムを思い通りに動かすためには、制御工学という授業で学ぶ知識が必要となります。
しかし、この制御工学では複雑な式(行列やベクトル、微分方程式)がたくさん出てきます。
そのため、理解することが難しく感じた方が多いと思います。
数式は何となく理解できるけども、実際にどの様に学んだ知識を使えばよいか分からない方もいるかと思います。
僕も初めのうちはそうでした。
本シリーズでは、制御工学で学ぶ基本的な知識から実際の応用例までを、なるべく分かりやすく解説していきたいと思います。

動的システムと制御理論の全体像
この世の中には、様々な動的システム(Dynamic System)があふれています。
そして、この動的システムの状態を常微分方程式(Ordinary Differential Equation: ODE)で表すということは、世界中の現象をモデル化できるという点で、とても良い方法です。
飛行機の翼に対する風の流れ、都市の人口の変化、感染症の広がり、そして株式市場の動向。
これら全ての現象は、動的システムとしてモデル化することが出来ます。
これらのシステムをモデル化する手法は、世の中のデータから作成したモデルをもとにした、未来の予測に使用することが出来ます。
さらに常微分方程式を用いたモデル化の手法は、未来の予測だけにとどまらず、動的システムを実際に操作して、思い通りにコントロールすることが可能になります。
例えば、制御理論(Control Theory)をベースにして、システムに入力する情報を事前に計画し、システムの制御を行うことが出来ます。
または、システムの状態を測定し、システムがどのような応答をしているかによって、制御の方針を決定することも出来ます。
このような制御理論の全体像としては、取り扱いたい現象(動的システム)が安定になるように、システムの常微分方程式を求めて、システムが望むように動作するように制御方針(Control Policy)を設計するという流れになります。
制御方法の種類
動的システムを制御する方法として、
- パッシブコントロール(受動制御、Passive Control)
- アクティブコントロール(能動制御、Active Control)
があります。
パッシブ制御とは
パッシブ制御(パッシブコントロール、受動制御)とは、システムの特性を制御することで、制御対象を望む通りに制御する手法です。
例えば、自動車の振動を抑える問題を考えます。
受動制御では、車両の機械システム内のバネやダンパーを調整することで振動を小さくします。
このとき、外部からのエネルギーは与えられません。
しかし、実際に動的システムを取り扱う際には、パッシブ制御のみでは限界があり、不十分なことが多くあります。
アクティブ制御とは
アクティブ制御(アクティブコントロール、能動制御)とは、外部からのエネルギーを与えることで、制御対象を望む通りに制御する手法です。
先ほどと同様に、自動車の振動を抑える問題を考えます。
能動制御では、車両に搭載されている油圧ポンプやコンプレッサーを外部からの信号で制御してエネルギー(動力)を与えることで、システムの振動を小さくします。
このアクティブ制御には
- オープン・ループ制御(開ループ制御、Open-loop Control)
- クローズド・ループ制御(閉ループ制御、Closed-loop Control)
の2つがあります。
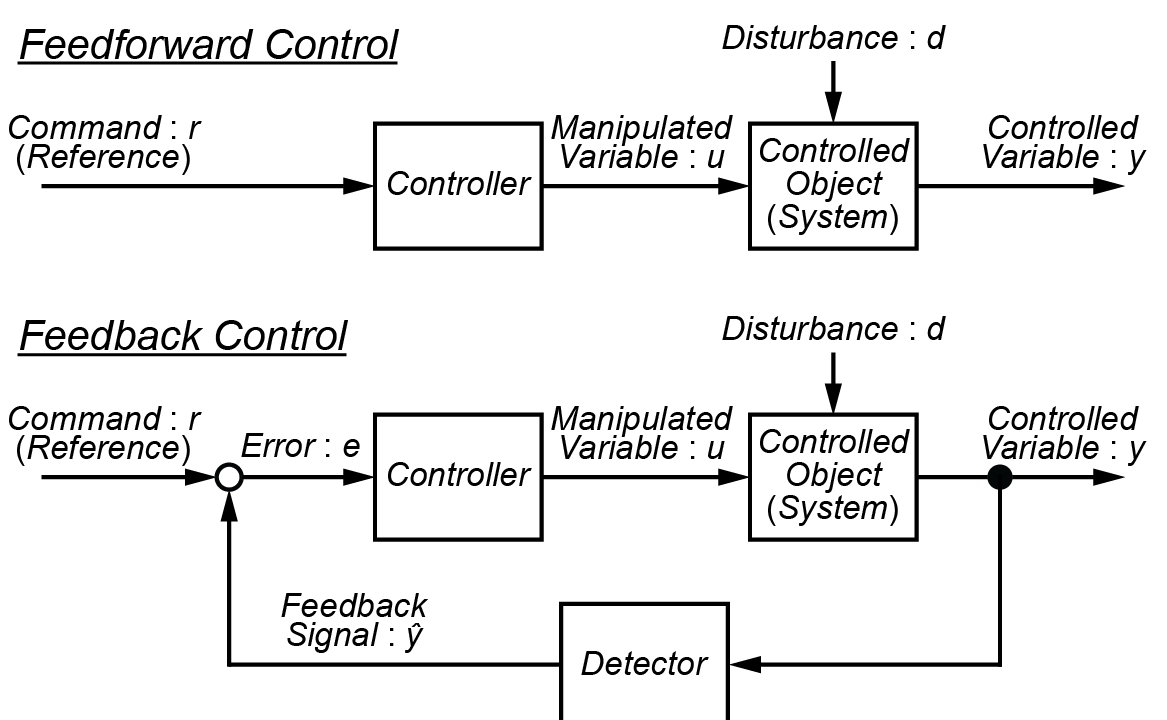
オープンループ制御
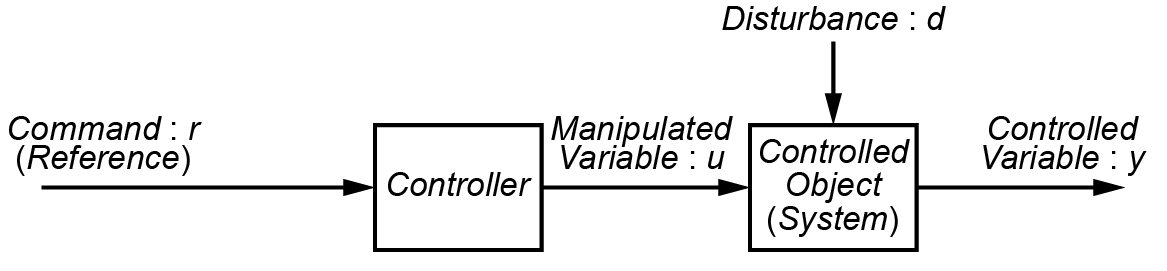
図のようにオープンループ制御(開ループ制御)のシステムには、入力と出力があります。
この閉ループ制御で望み通りの出力を得るためには、完璧な入力を求める必要があります。
そのため、制御対象システムのダイナミクス(Dynamics)求めます。
そして、そのダイナミクスの反転を使って、完璧な入力を正確に求めます。
この開ループ制御は、基本的に制御したいシステムに対して事前に入力を用意することで、システムを思い通りにコントロールします。
しかし、欠点もあります。
例えば、倒立振子(上向きの棒振り子)を安定に(まっすぐに)保つように制御する場合を考えます。
この倒立振子をオープンループ制御を使って安定に保つためには、常に入力として高速な正弦波を上下方向に与える必要があります。
(カピッツアの振り子:Kapitza’s pendulum)
そして、もしも入力が停止した場合、倒立振子は不安定になり倒れます。
クローズドループ制御
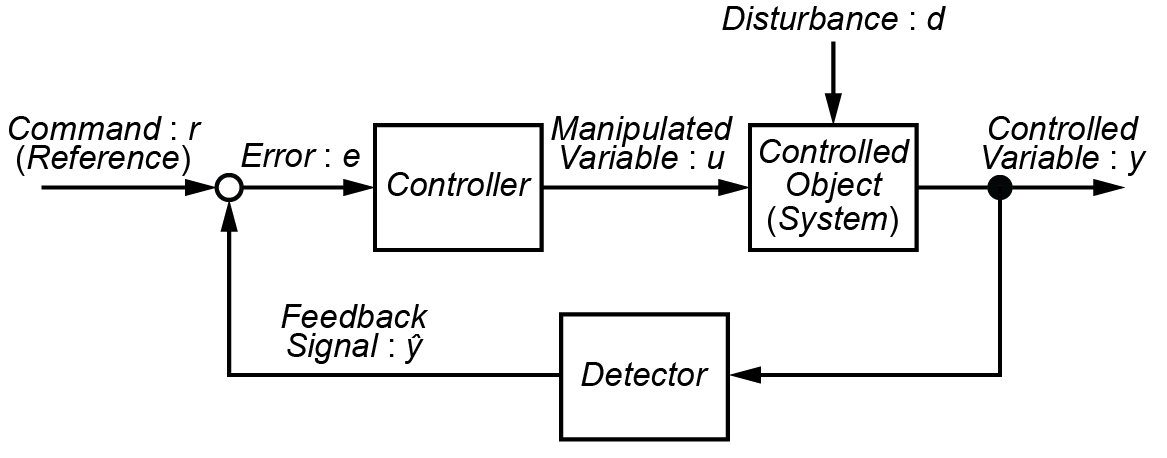
図のようにクローズドループ制御(閉ループ制御)のシステムは、入力と出力に加えてフィードバック部があります。
センサーなどの測定装置を使って、現在のシステムの状態を観測します。
そして、観測した値を基にシステムを制御するために最適な信号を入力として与えます。
倒立振子を閉ループ・フィードバック制御で安定にまっすぐに保つ場合を考えます。
人間でいう目のような役割を持つセンサーを用いて、棒振り子の傾き(角度)や倒れるスピード(角速度)を検出します。
そして、この値を基に入力として下部の支点を左右に少しだけ動かすことで、倒立振子を安定に保つことが出来ます。
このときの左右の動きはとても小さくてよく、開ループ制御の場合に用いた高速な上下運動に比べて、必要なエネルギー量が小さくて良くなります。
本シリーズでは、この閉ループ・フィードバック制御に注目して、動的システムの制御を行いたいと思います。
まとめ
今回は、世の中にあふれる動的システムについてと、制御方法の種類について紹介しました。
動的システムと常微分方程式を用いることで、様々な現象の予測や制御が可能になります。
次回は、今回紹介した制御方法の中でも注目するフィードバック制御について、「なぜフィードバックが良いのか?」や「他の手法に対する利点は?」について紹介していきたいと思います。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
