



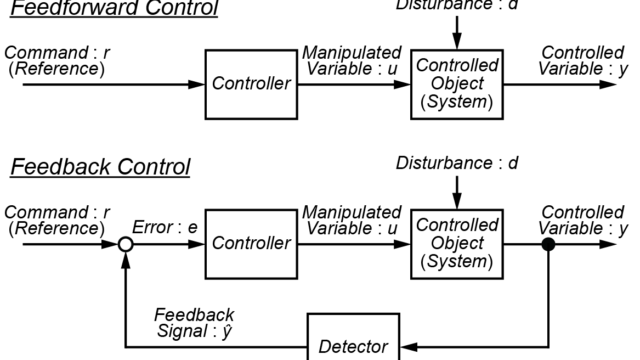
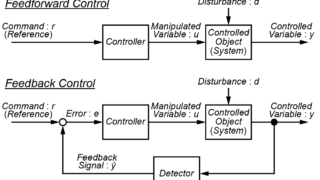
PID制御とはフィードバックを用いた古典制御の中の一つです。
その名の通り、現在の出力値\(y\)について目標値\(r\)との偏差\(e\)(Propotional)とその値の積分(Integral)や微分(Differential)の3要素を用いて制御を行います。
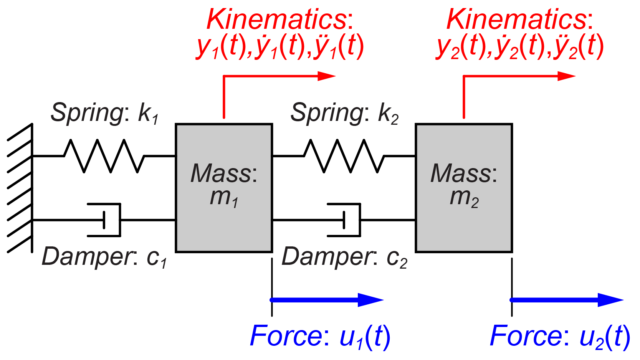
今回は制御対象のシステムとして、
$$ G_p = \exp(-0.2 s) \frac{1}{9 s^2 + 9 s + 2} $$
の二次遅れ系を使用しました。
この制御システムの意味が分からなくても、PID制御は理解できるように説明しますので、安心してください。
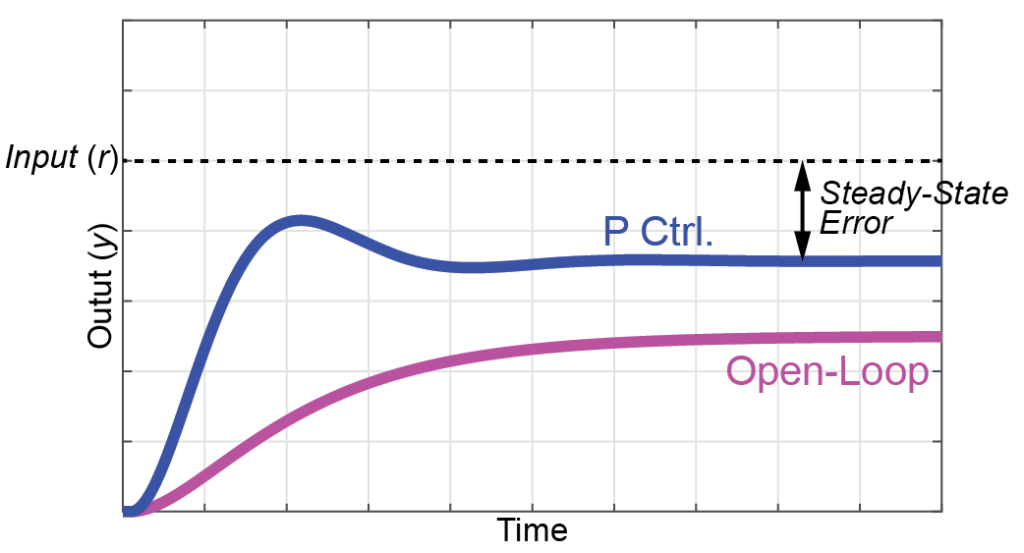
P制御
P制御(比例制御)は、出力値と目標値の偏差\(e\)に対して、比例ゲイン\(K_p\)を用いてフィードバック制御を行う方法です。
時刻\(t\)で出力値\(y\)と目標値\(r\)の時、その偏差\(e\)は、
$$ e (t) = r (t) – y (t) $$
となります。
P制御の入力\(u\)は、この偏差\(e\)に対して比例ゲイン\(K_p\)を掛け合わせたものとなります。
$$ u (t) = K_p e (t) $$
この入力を制御対象に送り目標値に対する制御を行います。
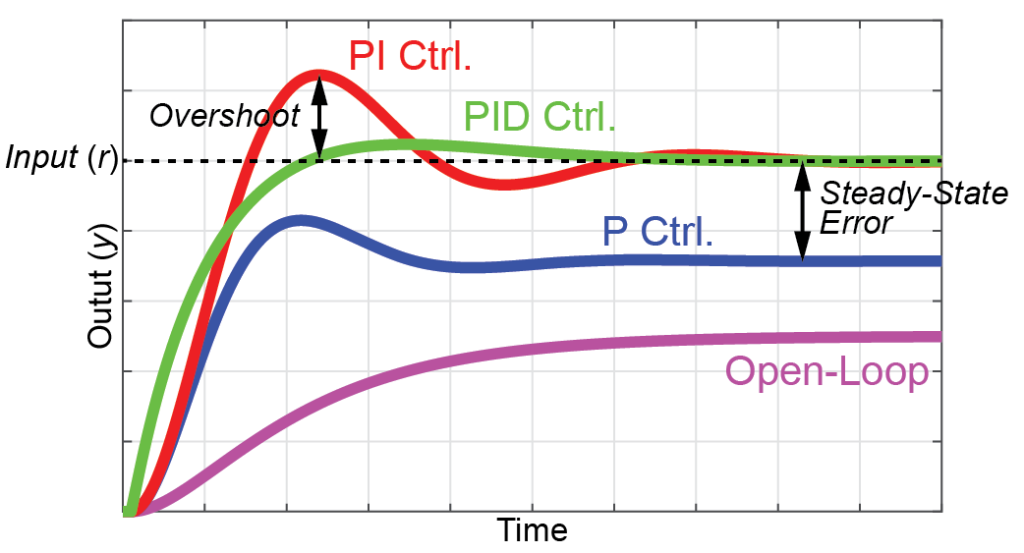
この比例ゲインKpが高ければ高いほど目標値に到達する時間が短くなります。
しかしP制御には問題があります。
時間が進むと目標値に対して出力値との偏差eがどんどん小さくなります。
そのため、目標値に達するための十分な入力値にならず、定常偏差(オフセット)と呼ばれる誤差が発生します。
PI制御
P制御での問題を解消するために、PI制御を行います。
PI制御では、P制御で追加した比例ゲイン\(K_p\)に加えて積分ゲイン\(K_i\)を用います。
この\(K_i\)を偏差\(e\)の時間積分に掛け合わせることでI制御を行います。
$$ u (t) = K_p e (t) + K_i \displaystyle \int_{0}^{t} e (\tau) d\tau $$
偏差\(e\)の時間積分に対する制御をすることで、偏差\(e\)が長く存在した場合(P制御で問題となった定常偏差が発生しているような場合)に、その分だけ入力\(u\)を大きくして、目標に近づけることが出来ます。
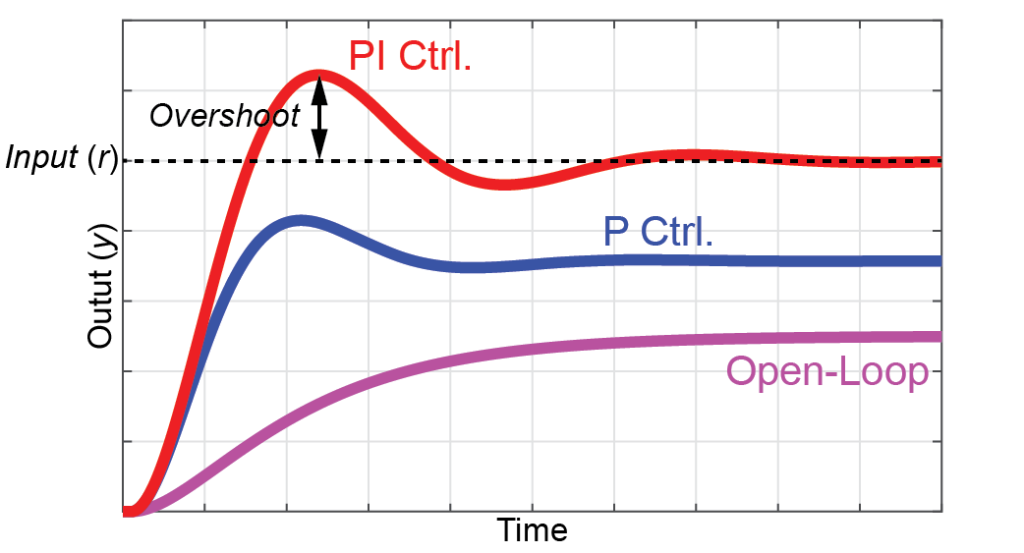
このPI制御はP制御の問題点を解決してくれますが、新たな問題もあります。
PI制御の問題は、目標値を行き過ぎる(オーバーシュート)ことや、目標値周辺を振動する現象が発生することです。
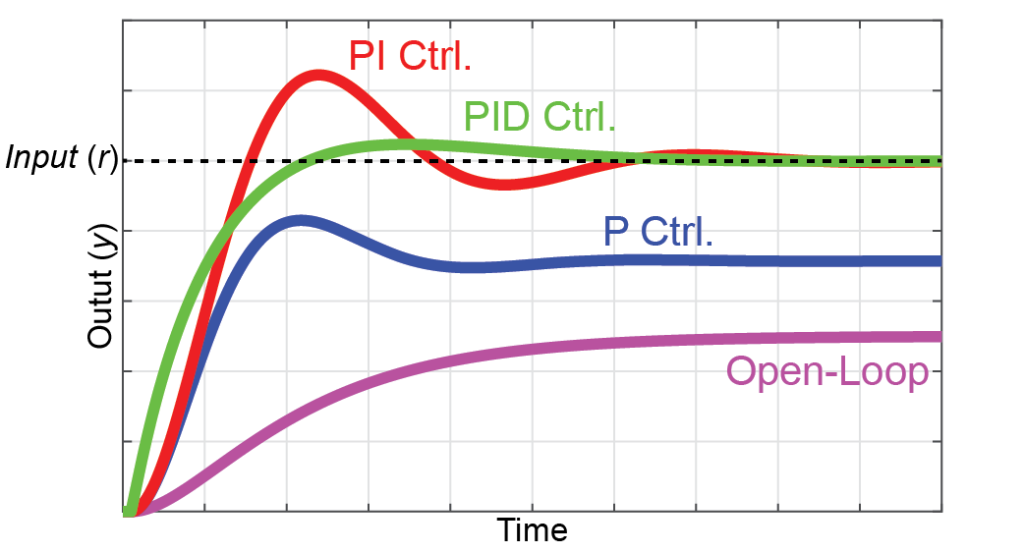
PID制御
PI制御の問題を解決するために、微分ゲイン\(K_d\)を追加します。これをPID制御と言います。
$$ u (t) = K_p e (t) + K_i \displaystyle \int_{0}^{t} e (\tau) d\tau + K_d \frac{d e(t)}{dt} $$
この微分ゲイン\(K_d\)は偏差\(e\)の時間微分に掛け合わせることで、PI制御の効果に加えて、急激な出力値の変化を抑えることが出来ます。
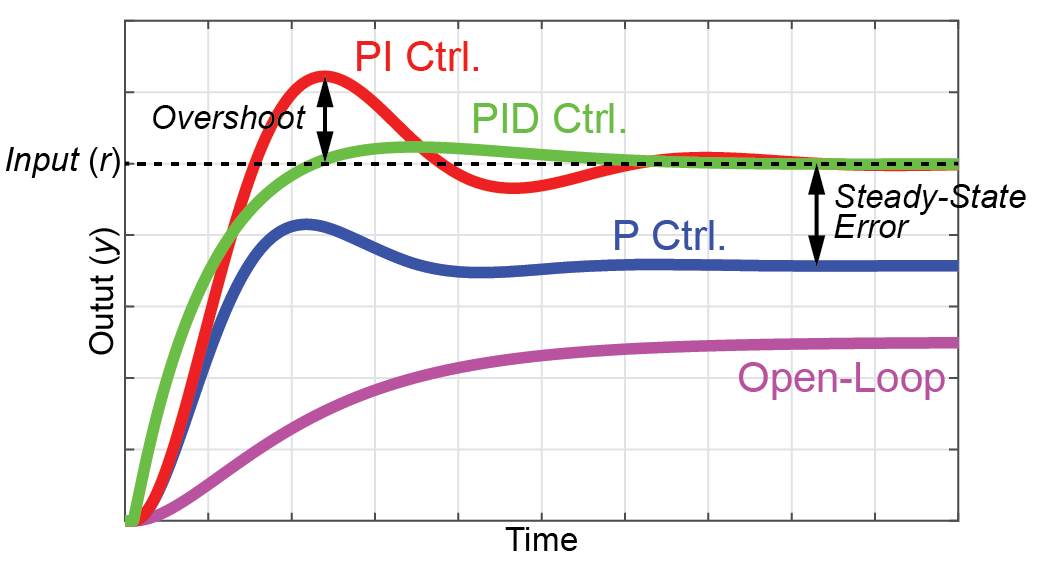
まとめ
PID制御では適切に各ゲインの値(\( K_p, K_i, K_d \))を決定することで、制御対象\(G_p\)を自由に制御することが可能になります。
この適切なゲインを決定する方法は色々と提案されていますが、未だにシミュレーションを用いて試行錯誤的に決定する場合が多くあります。




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
