



2次遅れ系システムの伝達関数を求めることで、その伝達関数からシステムのステップ応答の様子を算出することが出来ます。
今回は、質量とばね、ダンパーを含んだモデルを用いて、このモデルの伝達関数を算出し、ステップ応答の様子を表す各パラメータを算出する方法を紹介します。
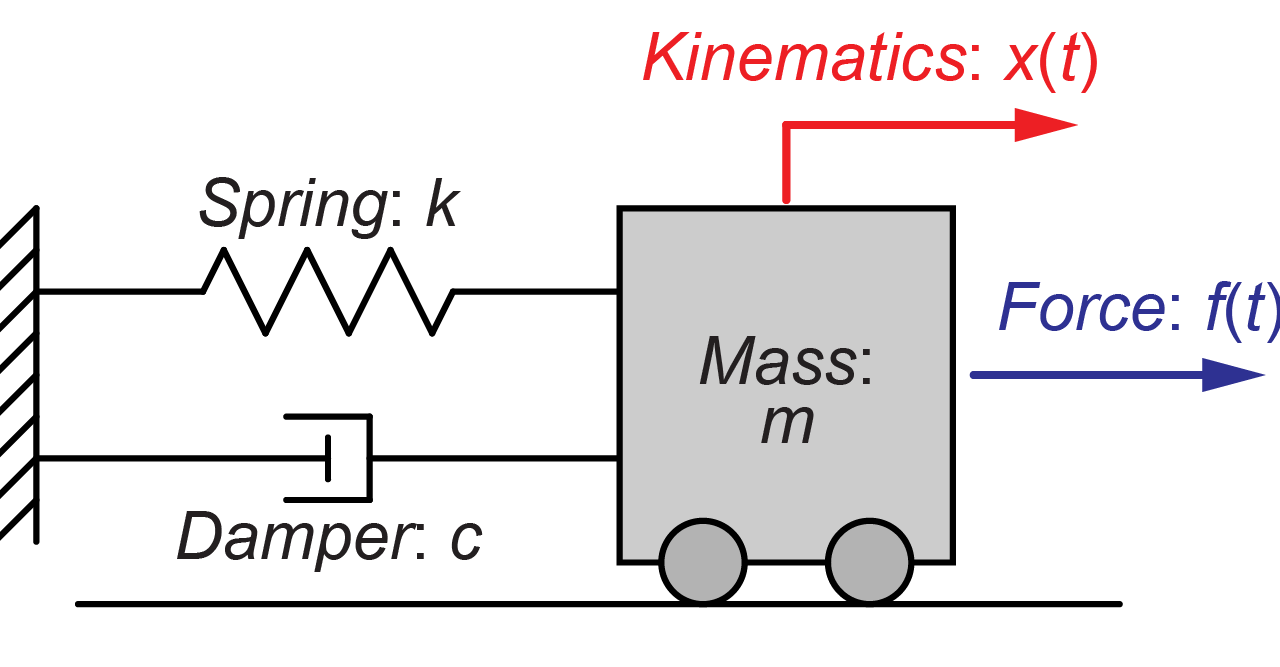
質量‐ばね‐ダンパーモデル
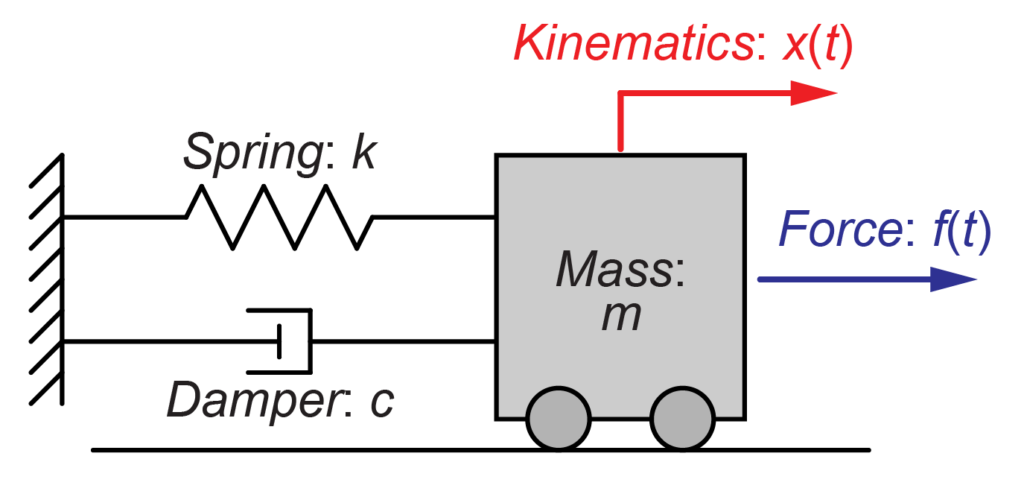
今回は、上の図のような質量\(m\)がばね\(k\)とダンパー\(c\)を介して壁に接続されているモデルに対し、ステップ入力として力\(f(t)\)を加えた時の質量\(m\)の変位\(x(t)\)を求めていきたいと思います。
今回は、モデル内の各パラメータを
$$ m = 10 [kg] $$
$$ k = 30 [N/m] $$
$$ c = 5 [N/(m/s)] $$
として実際にステップ応答の様子を算出していきます。
システムの伝達関数
今回の質量‐ばね‐ダンパーモデルの運動方程式は、
$$ f(t) = m \ddot{x}(t) + c \dot{x}(t) + k x(t) $$
となります。
この運動方程式をラプラス変換を用いて、時間領域\(t\)から周波数領域\(s\)に変換すると、
$$ F(s) = m s^2 X(s) + c s X(s) + k X(s) $$
と表すことが出来ます。
これより、入力\(F(s)\)と出力\(X(s)\)を表す伝達関数\(G(s) = \frac{X(s)}{F(s)}\)は、
$$ F(s) = \left(m s^2 + c s + k \right) X(s) $$
$$ \Rightarrow G(s) = \frac{X(s)}{F(s)} = \frac{1}{m s^2 + c s + k} $$
と求めることが出来ます。
伝達関数の分母内の\(s\)の次数から分かるように今回用いているシステムは、2次遅れ系システムです。
この式に今回用いているモデルの各パラメータを代入すると、システムの伝達関数\(G(s)\)は
$$ G(s) = \frac{1}{10 s^2 + 5 s + 30} $$
$$ = \frac{0.1}{s^2 + 0.5 s + 3} $$
となります。
この伝達関数を用いて、ステップ入力をシステムに与えた時の質量‐ばね‐ダンパーシステムのステップ応答の様子を求めていきます。
システムのステップ応答
先程求めた2次遅れ系システムの伝達関数
$$ G(s) = \frac{0.1}{s^2 + 0.5 s + 3} $$
からステップ入力を与えた際のステップ応答を算出していきます。
固有角周波数と減衰比
固有角周波数(Natural Frequency: \({\omega}_n\))と減衰比(Damping Ratio: \(zeta\))を算出していきます。
2次遅れ系システムの伝達関数\(T(s)\)の基本形
$$ T(s) = \frac{{\omega_n}^2}{s^2 + 2 \zeta \omega_n s+{\omega_n}^2} $$
と今回取り扱っているシステムの伝達関数\(G(s)\)から、
$$ {\omega_n}^2 = 3 $$
$$ 2 \zeta \omega_n = 0.5 $$
という関係式を導くことが出来ます。
これより、固有角周波数\({\omega}_n\)と減衰比\(zeta\)は、
$$ {\omega_n}^2 = 3 $$
$$ \Rightarrow \omega_n = \sqrt{3} $$
$$ 2 \zeta \omega_n = 0.5 $$
$$ \Rightarrow \zeta = \frac{0.5}{2 \omega_n} = \frac{0.5}{2 \sqrt{3}} = 0.144 $$
と求めることが出来ました。
まとめ
今回は、2次遅れ系システムとして質量とばね、ダンパーを含んだモデルを用いて、システムの伝達関数を求めてステップ応答の様子を算出するために、固有角周波数\(\omega_n\)と減衰比\(\zeta\)を算出する方法ところまで紹介しました。
次回は、今回求めた固有角周波数\(\omega_n\)と減衰比\(\zeta\)を用いて、システムのステップ応答の様子を算出する方法を紹介したいと思います。






















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
