

 制御工学
制御工学カスケード型制御系の基本構成とフィードフォワード制御系とフィードバック制御系との比較
2019-11-04 tajima Tajima Robotics
ロボットや工作機械を制御するために、フィードフォワード制御系やフィードバック制御系など様々な制御系があります。 その中 … 制御工学カスケード型制御系の基本と利点
2019-10-22 tajima Tajima Robotics
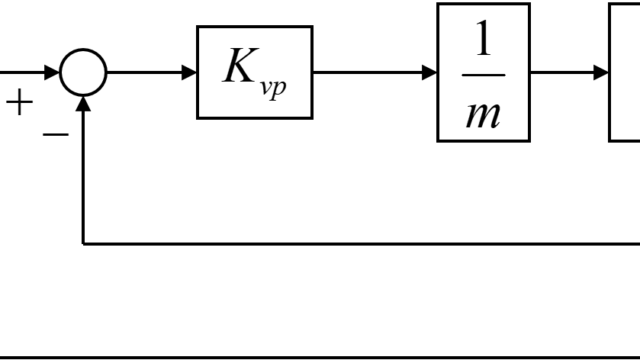
ロボットや工作機械を、望む目標値通りに動かすためには、制御装置がとても重要です。 今回の記事では、工作機械やロボットの位置決め・送り制御に広く用いられているカスケード … ロボット技術
ロボット技術ブロック線図の簡略化を行うコツ:考え方のステップを紹介
2019-02-28 tajima Tajima Robotics
複雑なブロック線図を簡単化して、シンプルなブロック線図に簡略化することで、システムを取り扱いやすく、制御しやすくすることが出来ます。 …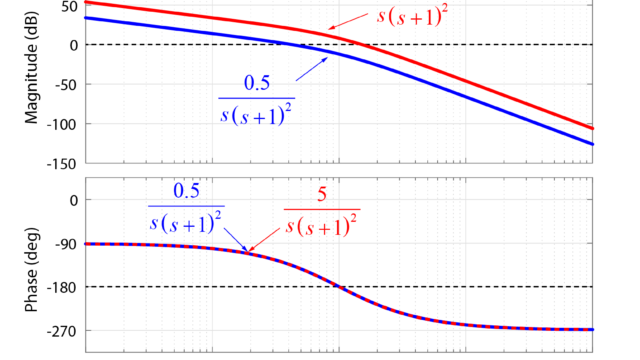 制御工学
制御工学システムの安定性をボード線図の安定余裕から確認する方法
2018-12-25 tajima Tajima Robotics
制御システムの安定性をボード線図を用いて判別する方法を紹介しています。 前回の記事では、開ループ系のボード線図からゲイ …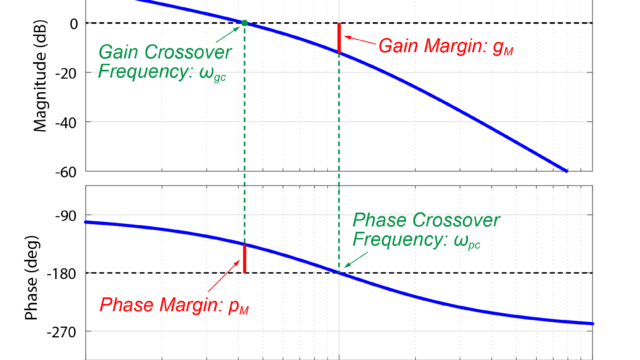 制御工学
制御工学ボード線図の位相余裕とゲイン余裕から安定性を確認する方法
2018-12-23 tajima Tajima Robotics
あるシステムを制御する際に、そのシステムが安定か不安定かを事前に確認することは、とても重要です。 システムが不安定の場 …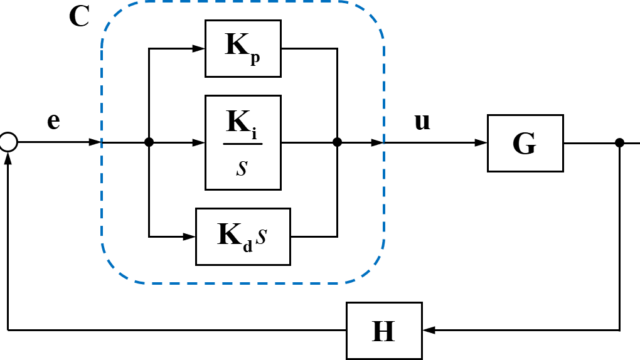 制御工学
制御工学PID制御のブロック線図と伝達関数を表す方法
2018-12-21 tajima Tajima Robotics
今回の記事では、 制御の世界で広く用いられているPID制御(PID Controller)について説明し、PID制御を用いたフィードバック制御をブロック線図(Block D …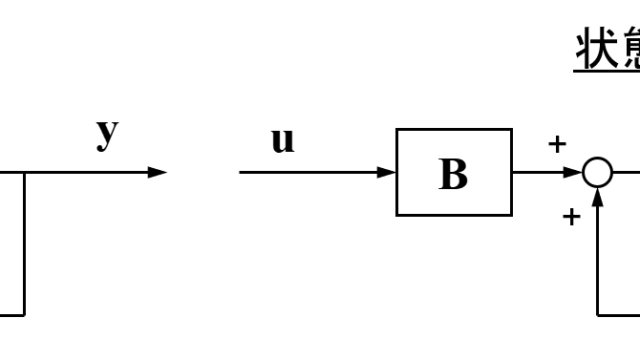 制御工学
制御工学状態フィードバックの状態方程式をブロック線図で表す
2018-12-13 tajima Tajima Robotics
システムの制御を行う際に、システムの状態をフィードバックして行う制御方があります。 以前の記事で紹介した台車型倒立振子 … ロボット工学
ロボット工学台車型倒立振子を安定にフィードバック制御する
2018-12-02 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回までの記事では、台車型倒立振子を制御するために … ロボット工学台車型倒立振子の安定性と可制御性を確認する
2018-11-13 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回の記事では、非線形関数で表された台車型倒立振子の状態方 … ロボット工学台車型倒立振子の状態方程式を線形化する
2018-11-10 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回までの記事では、台車型倒立振子システムの運動方程式から …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
