



 制御工学
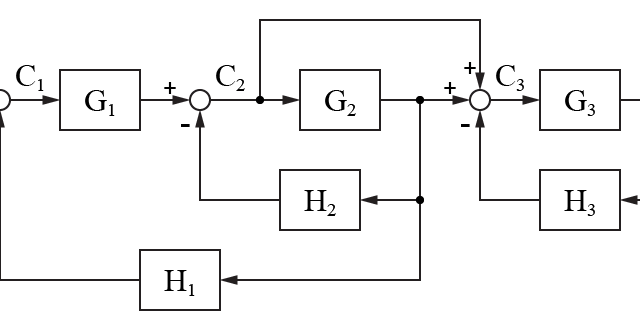
制御工学複雑なブロック線図を簡単化する
2018-01-29 tajima Tajima Robotics
ロボットなどのシステムについて、ブロック線図を用いることで入力と出力の関係を表すことが出来ます。 今回は、複数の伝達要素、加え合わせ点、引き出し点で構成された … 制御工学
制御工学システムを伝達関数で表す:入力、動摩擦力ありの質量、ばね、ダンパーによるシステム
2018-01-28 tajima Tajima Robotics
ロボットなどを制御するために伝達関数を用いて、入力に対する出力を表す方法を紹介します。 今回は、質量にばねとダンパーが …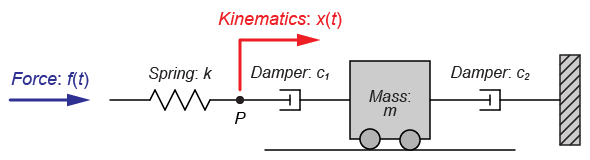 制御工学
制御工学システムを伝達関数で表す:入力ありの質量、ばね、ダンパーによるシステム
2018-01-27 tajima Tajima Robotics
ロボット等の自動制御系を取り扱うために、伝達関数を用いる方法があります。 今回は、質量にばねとダンパーが含まれているシ …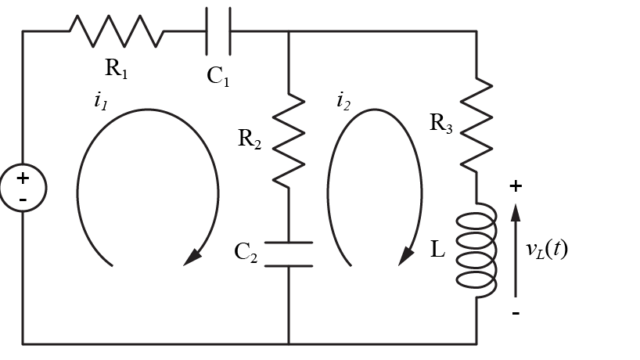 制御工学
制御工学少し複雑な電気回路システムを伝達関数で表す:RLC回路
2018-01-25 tajima Tajima Robotics
伝達関数(Transfer Function)を用いたシステムの表現は、ロボットの制御を理解するために重要な手法です。 …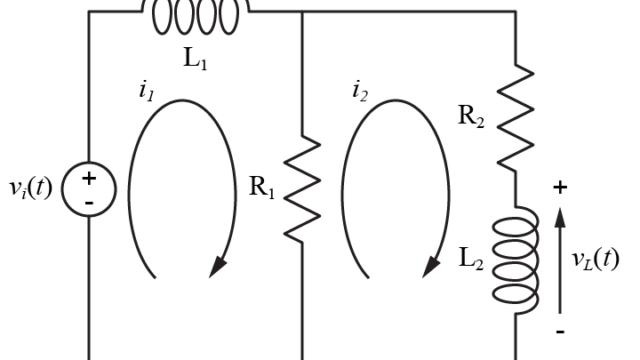 制御工学
制御工学少し複雑な電気回路システムを伝達関数で表す:RL回路
2018-01-24 tajima Tajima Robotics
ロボットの制御を理解するために重要な伝達関数(Transfer Function)について、抵抗\(R\)、コイル\(L\)が含まれ …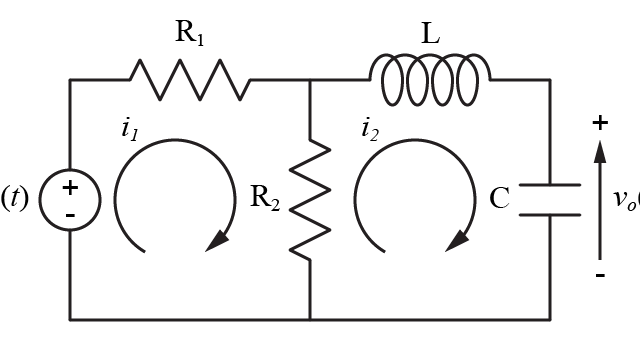 制御工学
制御工学電気回路システムを伝達関数で表す:RLC回路
2018-01-23 tajima Tajima Robotics
ロボットを制御するために、伝達関数(Transfer Function)を用いて、ロボットのシステムを数式で表すという方法があります。 伝達関数を用いることで …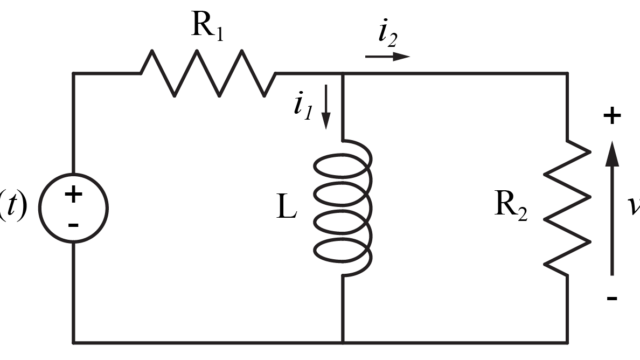 制御工学
制御工学電気回路システムを伝達関数で表す:RL回路
2018-01-21 tajima Tajima Robotics
ロボットを制御するためには、伝達関数(Transfer Function)を用いて、システムを表すことが多くあります。 伝達関数を用いることで、ある信号をシス …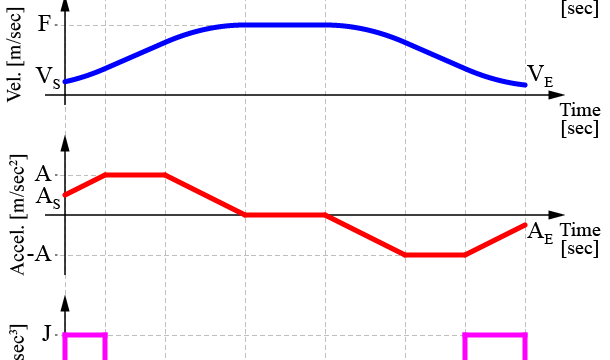 軌跡生成
軌跡生成ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する(その2)
2018-01-20 tajima Tajima Robotics
ロボットの加減速時に躍度(Jerk)を制御することで、台形加速度(Trapezoidal Acceleration)の軌跡を生成する … 軌跡生成ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する
2018-01-18 tajima Tajima Robotics
加速度(Acceleration)の単位時間当たりの変化率を表すものとして、躍度(Jerk、加加速度)があります。 今 …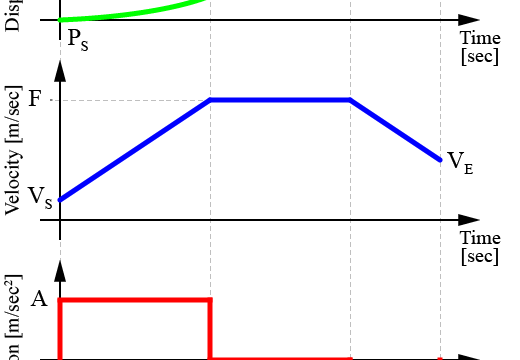 軌跡生成
軌跡生成ロボットの軌跡生成:加速度制限を用いて台形速度プロファイルを作成する
2018-01-17 tajima Tajima Robotics
ロボットの軌跡を生成する際に重要な項目として、 モータの出力できる限界を使って
短い時間で移動する という点が …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
