



 ロボット工学
ロボット工学伝達関数で質量‐ばね‐ダンパーシステムを表す
2017-12-09 tajima Tajima Robotics
今回は、伝達関数を使って質量‐ばね‐ダンパーシステムを表していきたいと思います。 線形微分方程式を用いて同じシステムを表した結果はこの記事を参考にして下さい。 … ロボット工学質量‐ばね‐ダンパーシステムを線形微分方程式で表す
2017-12-09 tajima Tajima Robotics
今回は、過去に紹介した線形微分方程式(Differential Equation)を用いて、質量‐ばね‐ダンパーシステム(Mass- … ロボット工学
ロボット工学ラプラス変換を用いてシステムを伝達関数で表す
2017-12-07 tajima Tajima Robotics
前回は、線形時不変システム(LTIシステム)を説明しました。 ただ、動的システムに対してLTIシステムのモデルを用いると計算が複雑になってしまいます。 そこで動 … ロボット工学線形時不変システム(LTIシステム)を理解する
2017-12-06 tajima Tajima Robotics
今回は、線形時不変システム(LTIシステム、Linear Time Invariant System)を説明したいと思います。
… ロボット工学静的システムと動的システムの違いは? 因果的・非因果的って何?
2017-12-05 tajima Tajima Robotics
ロボットのような制御対象となるシステムには、静的システムと動的システムがあります。 この二つのシステムの違いについて説明したい …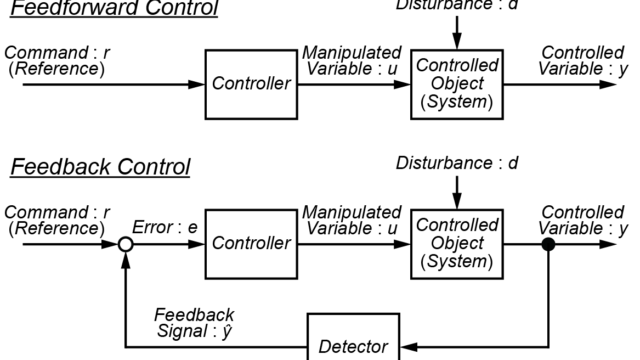 ロボット工学
ロボット工学フィードフォワード制御とフィードバック制御でロボットを自由に制御しよう
2017-12-04 tajima Tajima Robotics
ロボットなどを思い通りに動かすために、フィードフォワード制御とフィードバック制御があります。 この二つの制御方法は、
… ロボット工学
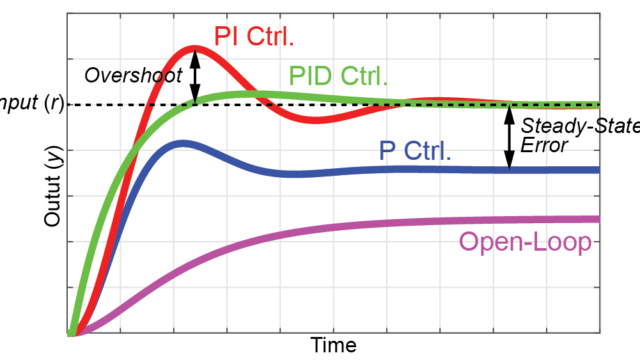
ロボット工学制御工学の基本 PID制御をマスターしてロボットを動かそう
2017-12-03 tajima Tajima Robotics
PID制御とはフィードバックを用いた古典制御の中の一つです。 その名の通り、現在の出力値\(y\)について目標値\(r …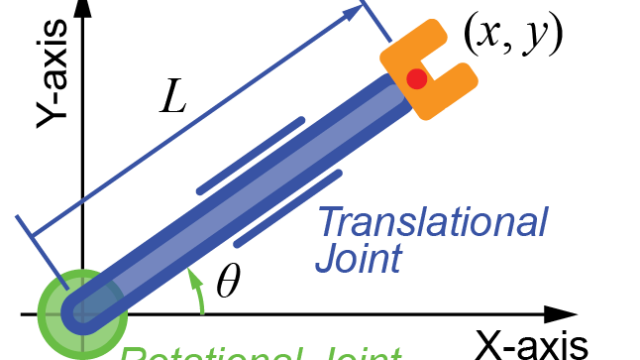 ロボット工学
ロボット工学ヤコビ行列を使ってロボットの運動を計算する
2017-12-02 tajima Tajima Robotics
今回はヤコビ行列について説明したいと思います。 ヤコビ行列を使うことで、ロボットの「関節の速度」と「手先の速度」の関係を示すことが出来ます。 ヤコビ … ロボット工学
ロボット工学車輪ロボット(対向2輪型)の運動を計算してみよう
2017-12-02 tajima Tajima Robotics
今回は車輪ロボットとして対向2輪型ロボットの運動を取り扱いたいと思います。 車輪ロボットの中でもシンプルな構造なので、移動ロボ … ロボット工学ロボット工学の基礎 順運動学と逆運動学を理解する
2017-11-30 tajima Tajima Robotics
ロボット工学を学ぶうえで必要な基本、 『順運動学』と『逆運動学』について解説してきます。 運動学の定義
運動学とは …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
