



スポンサーリンク
ロボットの軌跡生成(Trajectory Generation)技術についての情報を紹介します。
- 2点間を結ぶ軌跡生成
- スムーズな軌跡生成(速度プロファイル)
- 3次スプライン補間
Contents
2点間を結ぶ軌跡生成
- 直線補間
- 円弧補間
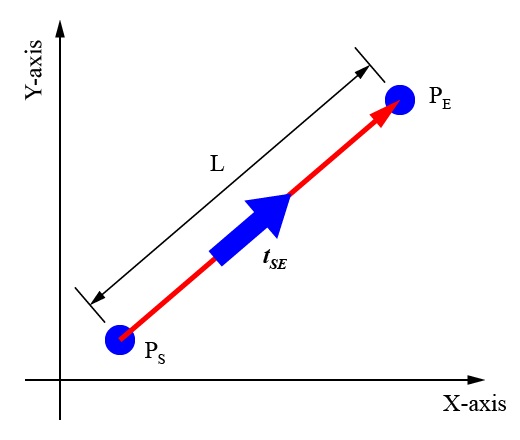
直線補間
ロボットの軌跡生成:直線補間 軌跡生成(Trajectory Generation)とは、ロボットの状態(位置や姿勢)をある点から他の点に移動させるために、必...
ロボットの軌跡生成:2次元の直線補間 今回は、2次元のXY平面モデルでの直線補間(Linear Interpolation)について紹介します。 1次元...
円弧補間
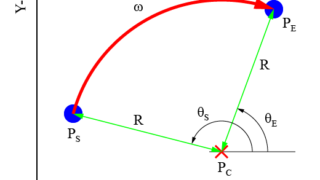
ロボットの軌跡生成:円弧補間 ロボットがXY平面上の点から他の点へ移動する軌跡生成(Trajectory Generation)の方法には、 直線補...
スムーズな軌跡生成
- 方形速度プロファイル
- 台形速度プロファイル
- 台形加速度(S字速度)プロファイル
台形速度プロファイル
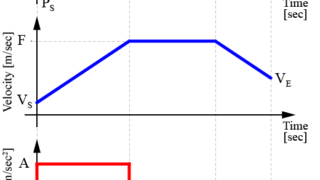
ロボットの軌跡生成:加速度制限を用いて台形速度プロファイルを作成する ロボットの軌跡を生成する際に重要な項目として、 モータの出力できる限界を使って
短い時間で移動する という...
台形加速度プロファイル
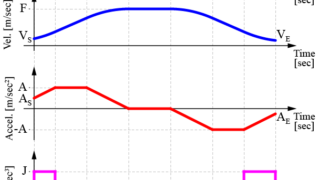
ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する 加速度(Acceleration)の単位時間当たりの変化率を表すものとして、躍度(Jerk、加加速度)があります。 ...
ロボットの軌跡生成:躍度制限を用いて台形加速度プロファイルを作成する(その2) ロボットの加減速時に躍度(Jerk)を制御することで、台形加速度(Trapezoidal Acceleration)の軌跡を生成...
3次スプライン補間
- 3次スプライン補間とは
- 3次多項式のパラメータを算出する
- 実際に3次スプライン補間を行う
- 媒介変数を用いた3次スプライン補間
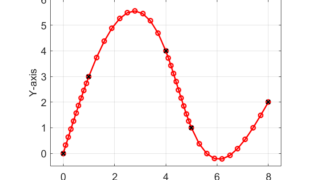
3次スプライン補間とは
3次スプライン補間とは(3次多項式と補間条件)

3次スプライン補間で軌跡生成:3次多項式と補間条件 ロボットなどを動かす経路を指定する際に、通過してほしい点を離散的な指令点で指示することが多くあります。 この様な離...
3次多項式のパラメータを算出する
3次スプライン補間で軌跡生成:3次多項式のパラメータを求める(その1) 3次スプライン補間を用いた離散点から連続的な軌跡を生成する方法を紹介します。 前回の記事では、3次スプライン補間に...
3次スプライン補間で軌跡生成:3次多項式のパラメータを求める(その2) 離散的な位置指令から3次スプライン補間を用いて連続的な軌跡を生成する方法を紹介します。 前回の記事では、3次スプラ...
実際に3次スプライン補間を行う
3次スプライン補間で軌跡生成:連続的な軌跡を生成する(その1) 前回までの記事では、3次スプライン補間に用いる3次多項式のパラメータを求める方法を紹介しました。 https://taji...
3次スプライン補間で軌跡生成:連続的な軌跡を生成する(その2) 3次スプライン補間を用いることで、離散的な指令値から連続的で滑らかな軌跡の生成を実現することが出来ます。 前回の記...
媒介変数を用いた3次スプライン補間
3次スプライン補間で軌跡生成:媒介変数を用いて軌跡を生成する 離散点で不連続な指令値が与えられた場合、ロボット等を連続的で滑らかに制御するために各指令点を補間する必要があります。 ...
スポンサーリンク
スポンサーリンク




















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
