



今回の記事では、 制御の世界で広く用いられているPID制御(PID Controller)について説明し、PID制御を用いたフィードバック制御をブロック線図(Block Diagram)と伝達関数(Transfer Function)で表す方法を紹介していきたいと思います。
PID制御とは
PID制御とは、フィードバック制御の内の一つです。
フィードバック制御のブロック線図は下の図のように表されます。
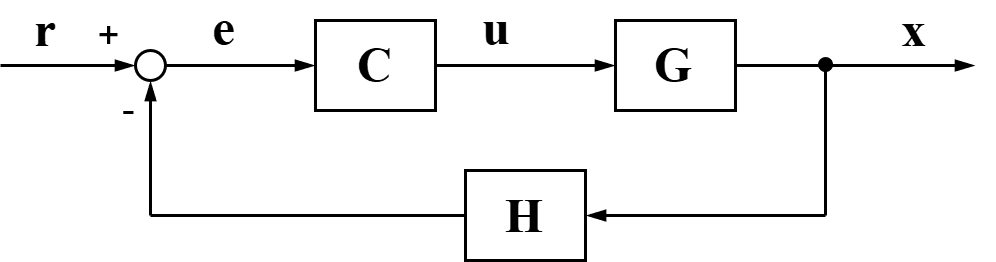
上のフィードバック制御のブロック線図に含まれているコントローラー(C)を
- 比例要素(Propostional)
- 積分要素(Integral)
- 微分要素(Differential)
の3つのパラメータを用いて設計し、偏差eから入力信号uを算出することで、PID制御を行います。
ちなみに、それぞれの英語の頭文字(Propostional、Integral、Differential)をとって、PID制御と呼んでいます。
PID制御の入力信号
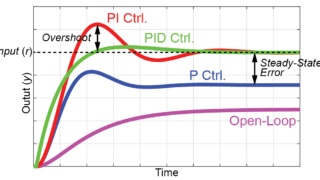
以前の記事でも紹介したように、PID制御は比例制御(P制御)、積分制御(I制御)、微分制御(D制御)を組み合わせた制御です。
PID制御における時間t領域での入力u(t)は、
$$ u (t) = K_p e (t) + K_i \displaystyle \int_{0}^{t} e (\tau) d\tau + K_d \frac{d e(t)}{dt} $$
という式で表されます。
PID制御のブロック線図や伝達関数を表すために、この時間t領域での入力u(t)をラプラス変換して、周波数s領域の入力U(s)で表す必要があります。

このPID制御における周波数s領域の入力U(s)は、ラプラス変換を用いて
$$ \begin{eqnarray} U (s) &=& K_p E (s) + \frac{K_i}{s} E (s) + K_d s E (s) \\ &=& \left( K_p + \frac{K_i}{s} + K_d s \right) E (s) \end{eqnarray} $$
という式で表すことが出来ます。
PID制御のブロック線図
先ほど紹介したフィードバック制御のブロック線図に含まれるコントローラーCをPID制御に置き換えて、PID制御のブロック線図を書いていきます。
PID制御のs領域での入力U(s)
$$ U (s) = \left( K_p + \frac{K_i}{s} + K_d s \right) E (s) $$
より、偏差E(s)と入力U(s)の関係を表すように式を変換すると
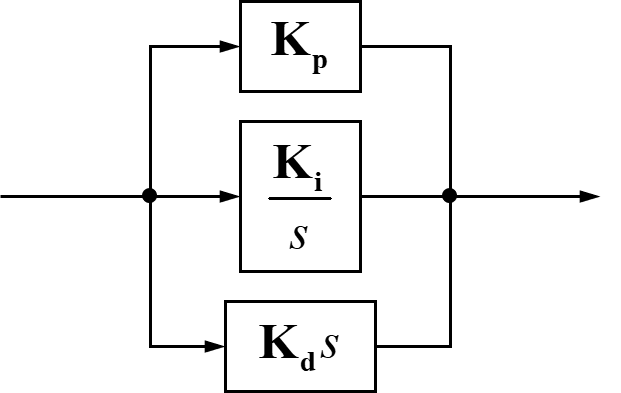
$$ C (s) = \frac{U (s)}{E (s)} = K_p + \frac{K_i}{s} + K_d s $$
のようにPID制御のコントローラーを表すことが出来ます。
これより、PID制御におけるコントローラーのブロック線図は下図のように表されます。
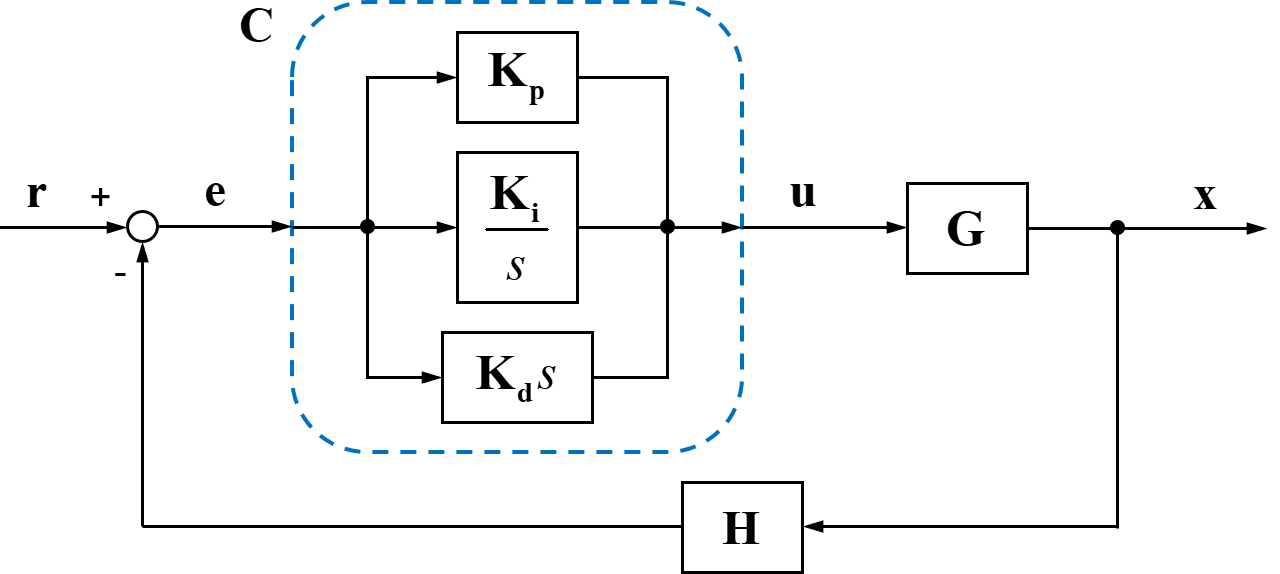
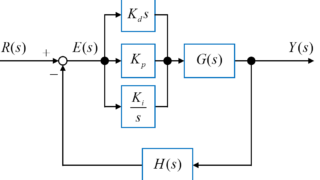
このPID制御部のブロック線図をフィードバック制御のブロック線図に入れると下の図のようになります。
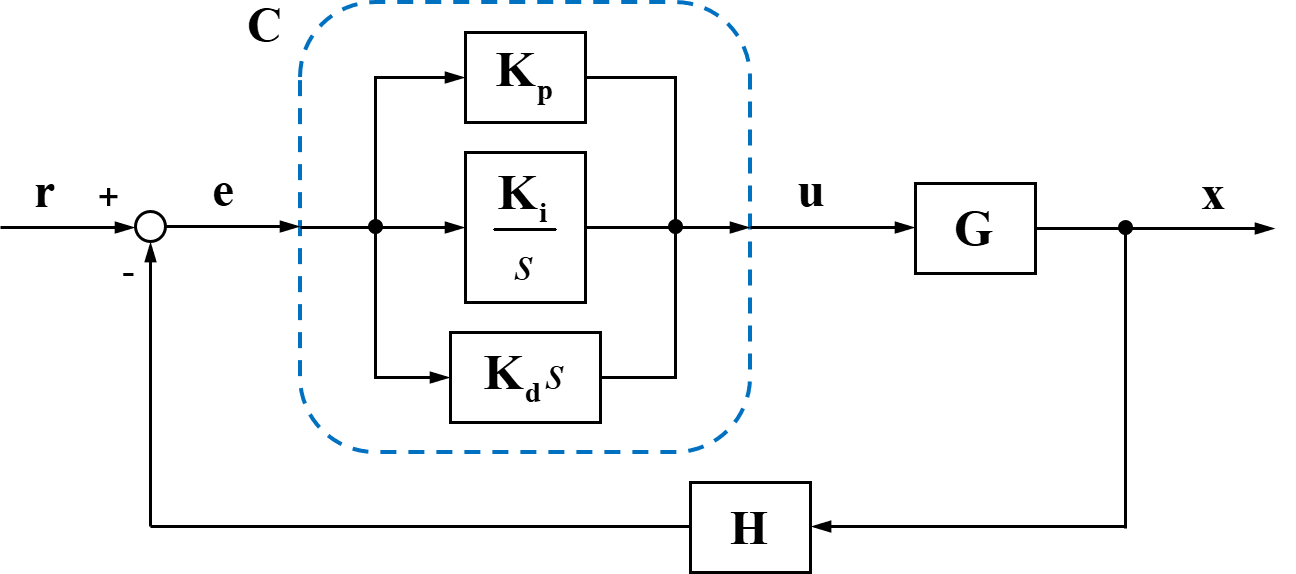
これで、PID制御を用いたフィードバックシステムのブロック線図を書くことが出来ました。
PID制御の伝達関数
今回の記事で取り扱っているPID制御のs領域での入力U(s)は
$$ U (s) = \left( K_p + \frac{K_i}{s} + K_d s \right) E (s) $$
となります。
これより、PID制御部の伝達関数C(s)は
$$ C (s) = \frac{U (s)}{E (s)} = K_p + \frac{K_i}{s} + K_d s $$
と表すことが出来ます。
この式を使ってPID制御を用いたフィードバックシステム全体の伝達関数を求めていきたいと思います。
とは言っても実際に行うことは、フィードバック制御の伝達関数に、PID制御部の伝達関数を代入するだけのシンプルなことです。
上の図で表されるフィードバック制御の伝達関数T(s)は
$$ T (s) = \frac{X (s)}{R (s)} = \frac{C(s) G(s)}{1 + C(s) G(s) H(s)} $$
となります。

ここで、制御対象G(s)とH(s)を
$$ \begin{eqnarray} \left\{ \begin{array}{l} G(s) = \frac{{K \omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} \\ H(s) = 1 \end{array} \right. \end{eqnarray} $$
とすると、PID制御を用いたフィードバック制御の伝達関数は
$$ \begin{eqnarray} T(s) &=& \frac{\left( K_p + \frac{K_i}{s}+ K_d s \right) \frac{K {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} }{1 + \left( K_p + \frac{K_i}{s}+ K_d s \right) \frac{K {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2} } \\ &=& \frac{\left( K_p + \frac{K_i}{s}+ K_d s \right) {\omega_n}^2}{s^2 + 2 \zeta \omega_n s + {\omega_n}^2 + \left( K_p + \frac{K_i}{s}+ K_d s \right) K {\omega_n}^2} \end{eqnarray} $$
と表すことが出来ます。
まとめ
今回の記事では、PID制御のブロック線図と伝達関数について紹介しました。
PID制御に含まれる3つのパラメータを変更することで、目標通りに制御対象をコントロールすることが出来ます。
合わせて読みたい
PID制御の安定性についてはこちら





















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
