



 ロボット工学
ロボット工学2質量モデルの振動を求める:固有値解析で振動を表す式を算出
2018-01-05 tajima Tajima Robotics
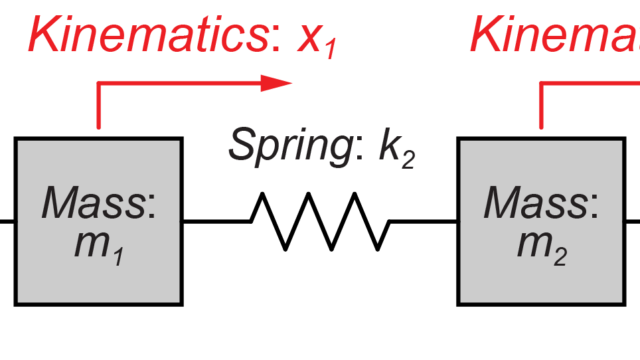
複数の質量からなるモデルについて、固有値解析を用いて運動方程式からシステムの振動を算出する方法を紹介します。 ラプラス … ロボット工学2質量モデルの振動を求める:振動を表す式の算出
2018-01-04 tajima Tajima Robotics
複数の質量からなるモデルを用いて、このシステムの振動を算出する方法を紹介します 前の記事では、2質量モデルの運動方程式 … ロボット工学2質量モデルの振動を求める:運動方程式の算出
2018-01-03 tajima Tajima Robotics
複数の質量からなるモデルを用いて、このシステムの振動を算出する方法を紹介します。 1つの質量からなるモデルの振動については、こちらの記事を参考にしてください。 … ロボット工学
ロボット工学ステップ入力に対するシステムの応答を算出する
2018-01-02 tajima Tajima Robotics
入力が与えられた質量-ばね-ダンパーシステムの応答をラプラス変換を用いて求めていきます。 前回の記事では、インパルス応答について紹介しました。 http … ロボット工学インパルス入力に対するシステムの応答を算出する
2018-01-01 tajima Tajima Robotics
ラプラス変換を用いて、システムに外から力が与えられた時の質量-ばね-ダンパーシステムの応答を求めていきます。 前回の記 … ロボット工学入力に対するシステムの応答を算出する
2017-12-31 tajima Tajima Robotics
ラプラス変換を用いて、力が与えられた時の質量-ばね-ダンパーシステムの応答を求めていきます。 今回は、入力する力に対する応答の種類として、 インパル …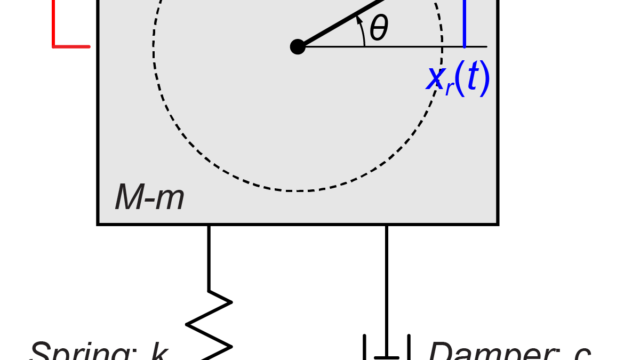 ロボット工学
ロボット工学回転体によるシステムの振動を運動方程式で表す(Rotating Unbalance)
2017-12-30 tajima Tajima Robotics
質量内を回転する物体によって生じる振動をシステムの運動方程式を用いて表したいと思います。 このようなシステムをRota …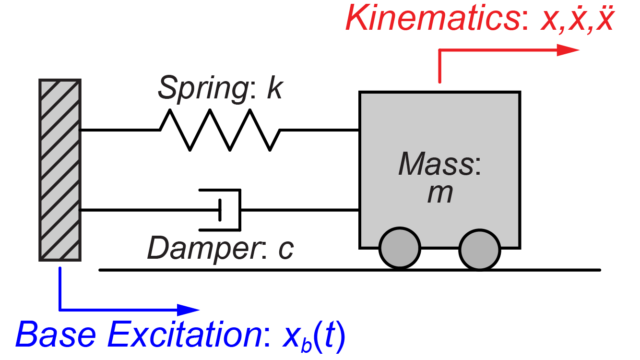 ロボット工学
ロボット工学基礎励振(Base Excitation)モデルの運動方程式を算出する
2017-12-29 tajima Tajima Robotics
基礎励振(Base Excitation)モデルについて、運動方程式を求める方法を説明したいと思います。 基礎励振 …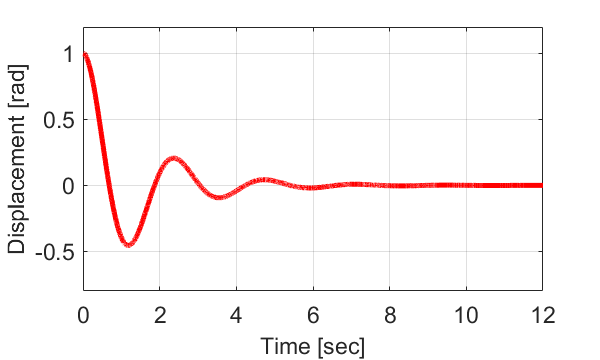 ロボット工学
ロボット工学ダンパーを含んだ剛体振り子の運動(臨界減衰システム、不足減衰システムの場合)
2017-12-28 tajima Tajima Robotics
前回は、ダンパーを含んだ剛体振り子の運動について加減衰システムとなる場合を説明しました。 https://tajimarobo …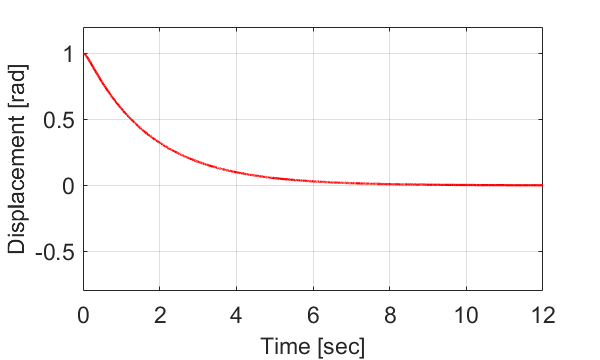 ロボット工学
ロボット工学ダンパーを含んだ剛体振り子の運動(加減衰システムの場合)
2017-12-27 tajima Tajima Robotics
今回は、算出した運動方程式から実際にシステムの運動を求めていきます。 運動方程式の算出方法については、こちらの記事を参 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
