


 ロボット技術
ロボット技術フーリエ変換のプログラムを自分で作成してみた
2018-12-11 tajima Tajima Robotics
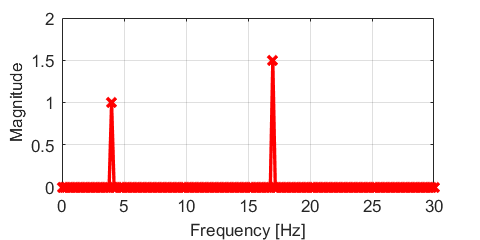
フーリエ変換を用いることで、時間による関数で与えられている信号に含まれる周波数成分を求めることが出来ます。 このフーリエ変換を行うためのプログラムは多く存在し …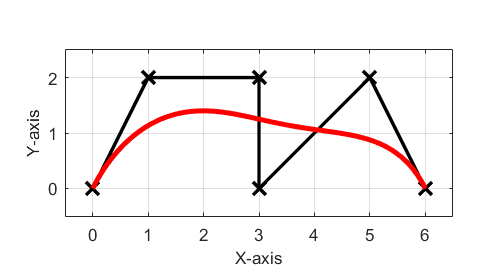 軌跡生成
軌跡生成ベジエ曲線で離散点を滑らかに補間する
2018-12-09 tajima Tajima Robotics
ベジエ曲線を用いることで、離散的な点を滑らかに補間することが出来ます。 このベジエ曲線は、Bスプライン曲線の特殊なケースであるという関係性があります。 …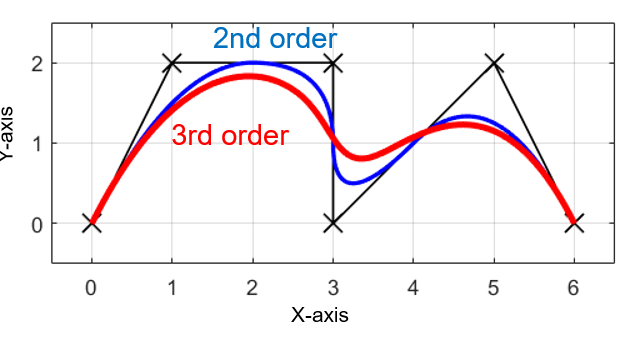 軌跡生成
軌跡生成Bスプライン曲線で離散点を補間するプログラムを解説してみる
2018-12-08 tajima Tajima Robotics
Bスプライン曲線を用いることで、離散的な点で与えられた指令を補間して、スムーズな曲線を作成することが出来ます。 https:/ … ロボット工学
ロボット工学台車型倒立振子を安定にフィードバック制御する
2018-12-02 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回までの記事では、台車型倒立振子を制御するために … ロボット工学台車型倒立振子の安定性と可制御性を確認する
2018-11-13 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回の記事では、非線形関数で表された台車型倒立振子の状態方 … ロボット工学台車型倒立振子の状態方程式を線形化する
2018-11-10 tajima Tajima Robotics
今回のシリーズでは、台車型倒立振子モデルを取り扱い、システムを安定に制御する方法を紹介しています。 前回までの記事では、台車型倒立振子システムの運動方程式から … ロボット工学台車型倒立振子を制御するために状態方程式を求める
2018-11-08 tajima Tajima Robotics
台車の上に倒立振子が設置されているシステムを台車型倒立振子と言います。 この台車型倒立振子を制御するために、システムの …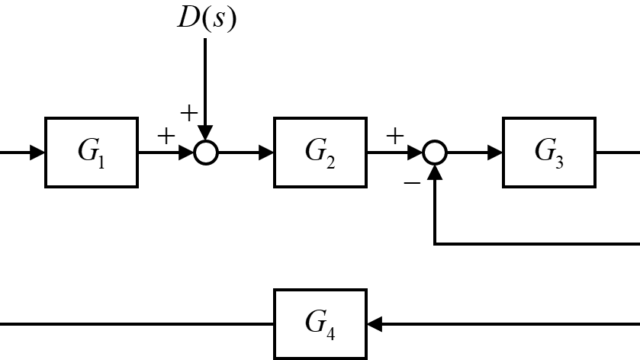 制御工学
制御工学外乱ありの少し複雑なブロック線図を簡単化する方法
2018-11-03 tajima Tajima Robotics
外乱を含むシステムを表す複雑なブロック線図を簡単化する方法を紹介します。 これまでの記事では、入力と出力により構成され …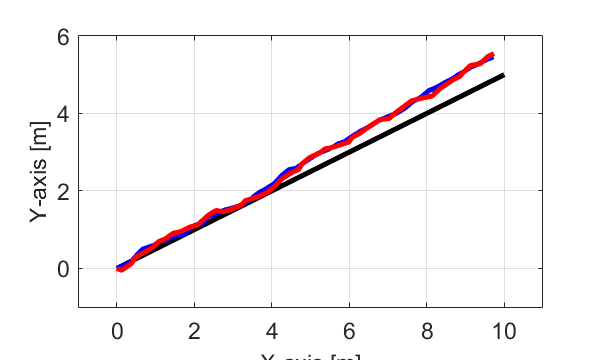 自動運転車
自動運転車カルマンフィルタでロボットの自己位置推定をするプログラムの紹介
2018-10-25 tajima Tajima Robotics
このシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いたロボッ … 自動運転車
自動運転車自動運転車を制御するプログラムの紹介
2018-10-14 tajima Tajima Robotics
本シリーズでは、車やロボットの自動運転を実際に行うために必要となる制御工学の情報を紹介していきます。 https://tajimarobotics.com/self- …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
