



 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にPD制御する
2018-03-28 tajima Tajima Robotics
前回の記事では、P制御を用いて制御対象の3次系システムをフィードバック制御する際に、システムの安定性を保てる制御系内のゲインの範囲を …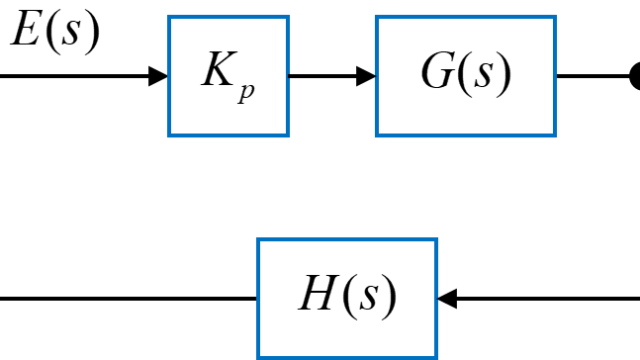 制御工学
制御工学PID制御とシステムの安定性:フィードバックシステムを安定にP制御する
2018-03-27 tajima Tajima Robotics
PID制御とは、フィードバックを含んで構成されている古典制御の内の一つです。 https://tajimarobotics.c …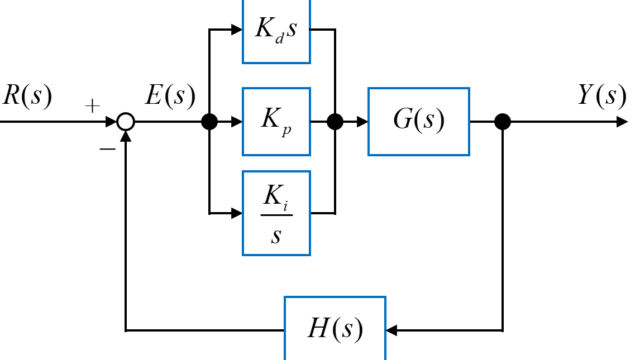 制御工学
制御工学PID制御とシステムの安定性:2次系フィードバックシステムを安定に制御する
2018-03-26 tajima Tajima Robotics
前回までの記事では、P制御、PI制御、PD制御を用いて2次系システムをフィードバック制御する際に、システムを安定に制御することが出来 … 制御工学PID制御とシステムの安定性:PD制御を用いて2次系システムを安定に制御する
2018-03-25 tajima Tajima Robotics
前回の記事では、PI制御を用いたフィードバック系を例に、制御系内の比例ゲインと積分ゲインをシステムの安定性が保てる範囲で制御する方法 …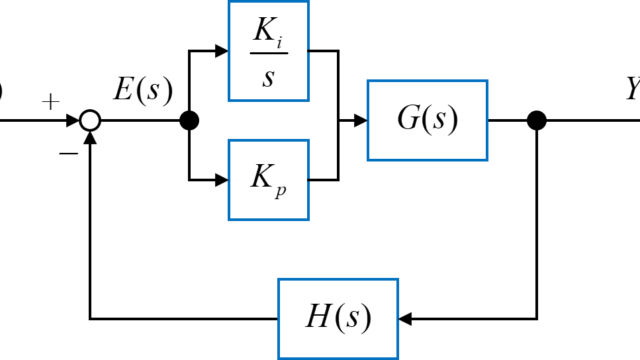 制御工学
制御工学PID制御とシステムの安定性:PI制御を用いて2次系システムを安定に制御する
2018-03-25 tajima Tajima Robotics
前回の記事から引き続き、PID制御を用いたフィードバックシステムについて、システムが安定性を保てる各ゲインの選定範囲を算出する方法を … 制御工学PID制御とシステムの安定性:P制御を用いて2次系システムを安定に制御する
2018-03-23 tajima Tajima Robotics
PID制御とは、古典制御の中の一つの手法で、フィードバックを用いて構成されています。 https://tajimaroboti …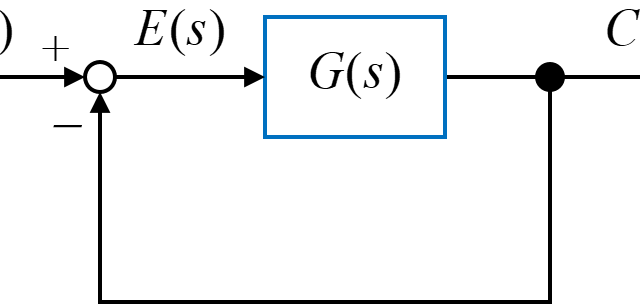 制御工学
制御工学システムの定常偏差:入力信号と制御系の出力信号との偏差(その2)
2018-03-15 tajima Tajima Robotics
安定な制御系について、ロボットや機械などを正確に制御する為に、システムの定常偏差(Steady-state error)を求めること … 制御工学
制御工学システムの定常偏差:入力信号と制御系の出力信号との偏差
2018-03-12 tajima Tajima Robotics
ロボットや機械などを制御する際に、システムの制御系が安定であることはとても重要です。 そのような安定な制御系について、 … 制御工学
制御工学システムの安定性:実際にラウス・フルビッツの安定判別法を用いてみる(その3)
2018-03-11 tajima Tajima Robotics
ロボットなどのシステムを制御する際にラウス・フルビッツの安定判別法はシステムの安定性を確認するためにとても有用な手法です。 … 制御工学
制御工学システムの安定性:実際にラウス・フルビッツの安定判別法を用いてみる(その2)
2018-03-10 tajima Tajima Robotics
ラウス・フルビッツの安定判別法はシステムの安定性を確認するために有用な手法です。 ロボットなどのシステムを制御する際に …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
