



 軌跡生成
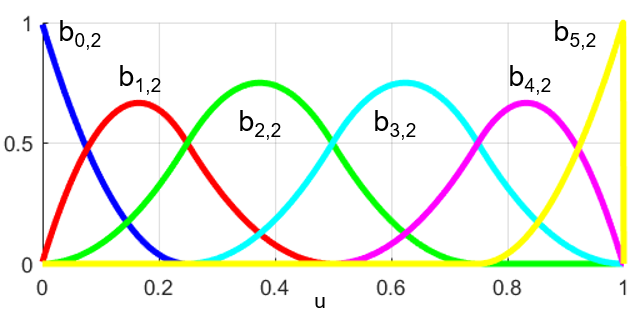
軌跡生成Bスプライン曲線を使ってロボットの軌跡生成をしてみよう!(その2)
2018-07-28 tajima Tajima Robotics
前回の記事から、Bスプライン曲線を用いた離散的で不連続な指令点を連続で滑らかに補間する方法を紹介しています。 https:// …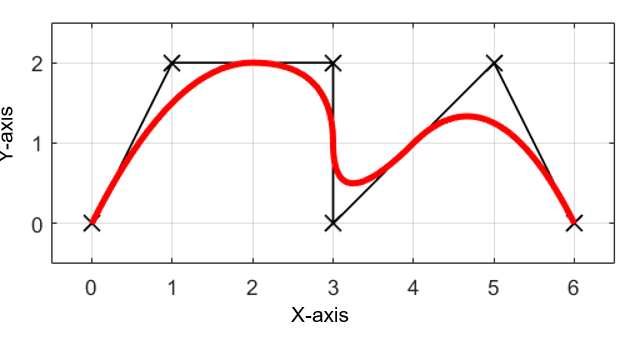 軌跡生成
軌跡生成Bスプライン曲線を使ってロボットの軌跡生成をしてみよう!(その1)
2018-07-27 tajima Tajima Robotics
前回の記事では、Bスプライン曲線とベジエ曲線について、それぞれの特徴と関係性を説明し、ロボットの軌跡生成への応用例を紹介しました。
… 軌跡生成Bスプライン曲線とベジエ曲線の違いは?離散点を補間してみよう!:ロボットの軌跡生成
2018-07-25 tajima Tajima Robotics
移動ロボットや工作機械などのシステムを目標の場所や状態に移動させるには、目標値を与える必要があります。 この目標値(ま … 自動運転車
自動運転車拡張カルマンフィルタのシミュレーション結果:カルマンフィルタでロボットの位置推定をしてみよう(8)
2018-06-30 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いたロボ … 自動運転車拡張カルマンフィルタとヤコビ行列:カルマンフィルタでロボットの位置推定をしてみよう(7)
2018-06-29 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いたロボ …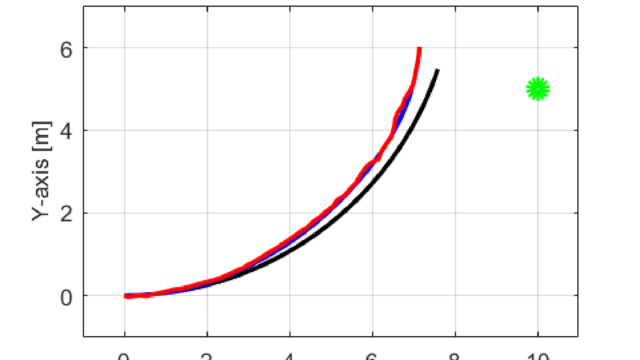 自動運転車
自動運転車非線形動的システムの状態空間モデル:カルマンフィルタでロボットの位置推定をしてみよう(6)
2018-06-27 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いたロボ … 自動運転車拡張カルマンフィルタって何?:カルマンフィルタでロボットの位置推定をしてみよう(5)
2018-06-16 tajima Tajima Robotics
今回のシリーズでは、自動運転車や移動ロボットを制御するためにとても重要な正確な位置を知る方法として、カルマンフィルタを用いたロボット …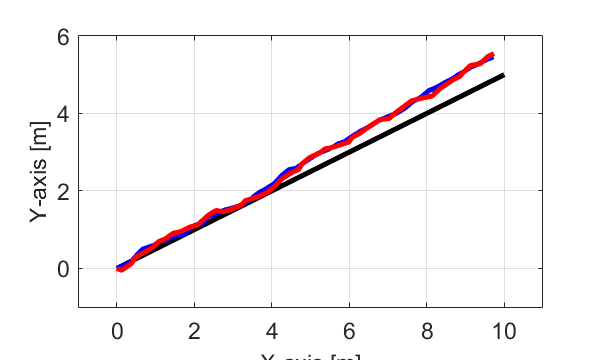 自動運転車
自動運転車シミュレーションで動作確認:カルマンフィルタでロボットの位置推定をしてみよう(4)
2018-06-08 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際に重要な、ロボットや車の正確な位置を得る方法として、カルマンフィルタを用いたロボ …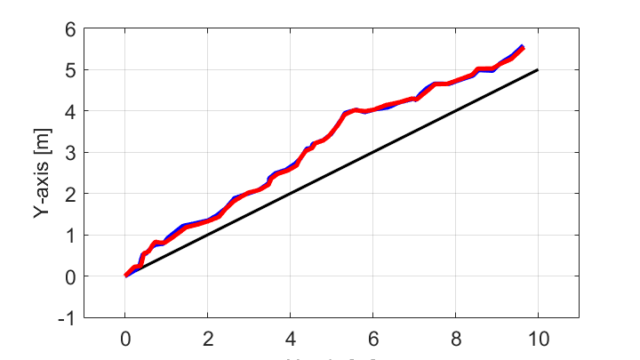 自動運転車
自動運転車カルマンフィルタと線形動的システム:カルマンフィルタでロボットの位置推定をしてみよう(3)
2018-06-02 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際にとても重要となる、ロボットや車の正確な位置を知る方法として、カルマンフィルタを … 自動運転車カルマンフィルタの基本式:カルマンフィルタでロボットの位置推定をしてみよう(2)
2018-05-31 tajima Tajima Robotics
今回のシリーズでは、ロボットや自動運転車を制御する際にとても重要となる、ロボットや車の正確な位置を知る方法として、カルマンフィルタを …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
