



 軌跡生成
軌跡生成加速度を制限して生成した軌跡を量子化して機械を正確に制御する
2019-01-21 tajima Tajima Robotics
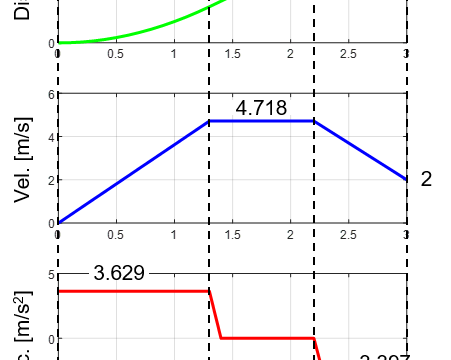
加速度制限による台形速度制御を行うことで、ロボットや機械を滑らかに動作させることが出来ます。 https://tajimaro …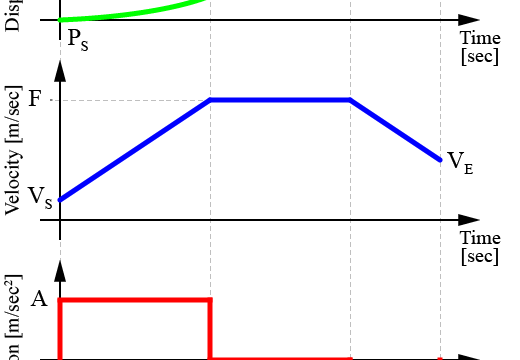 軌跡生成
軌跡生成台形速度プロファイルの軌跡を量子化してロボットを精密制御する
2019-01-17 tajima Tajima Robotics
ロボットの軌跡を生成する際に、加速度を制限した台形速度プロファイルを用いることで、ロボットを滑らかに制御することが出来ます。 …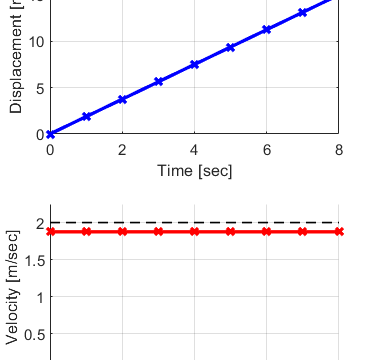 軌跡生成
軌跡生成軌跡生成の量子化をしてロボットを正確に制御する
2019-01-12 tajima Tajima Robotics
加速度制限や躍度制限による軌跡を生成することで、滑らかにロボットを制御できます。 以前の記事でも、これらの軌跡生成手法 …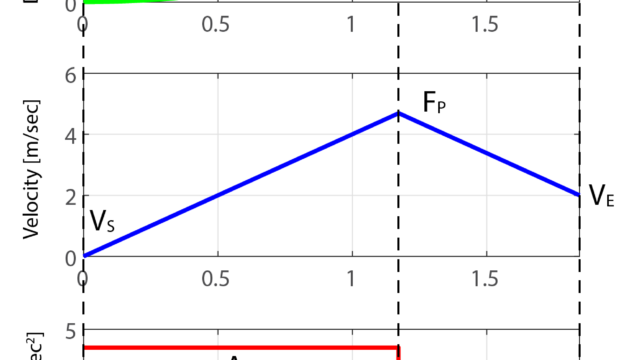 軌跡生成
軌跡生成加速度制限台形速度プロファイルによる軌跡生成の注意点:巡航期間が無い場合
2019-01-08 tajima Tajima Robotics
加速度制限による台形速度プロファイルを用いることで、ロボットを滑らかに制御することが可能になります。 前回までの記事で …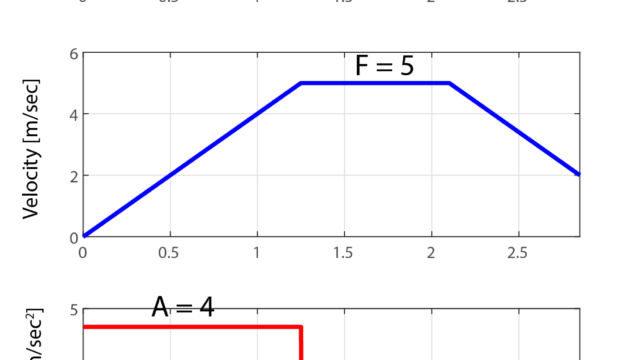 軌跡生成
軌跡生成台形速度の軌跡生成をしてロボットを制御する方法
2019-01-03 tajima Tajima Robotics
ロボットをスムーズに制御するために、台形速度プロファイルを用いた手法があります。 以前の記事では、この加速度を制限した …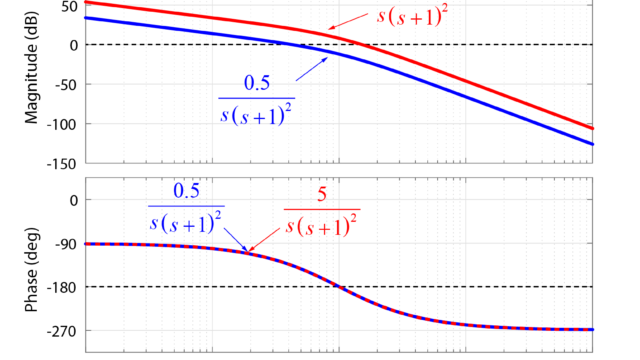 制御工学
制御工学システムの安定性をボード線図の安定余裕から確認する方法
2018-12-25 tajima Tajima Robotics
制御システムの安定性をボード線図を用いて判別する方法を紹介しています。 前回の記事では、開ループ系のボード線図からゲイ …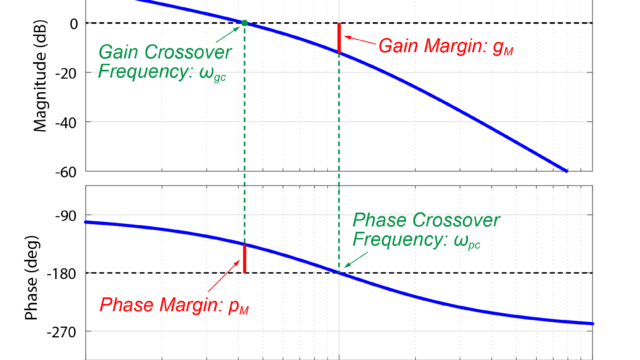 制御工学
制御工学ボード線図の位相余裕とゲイン余裕から安定性を確認する方法
2018-12-23 tajima Tajima Robotics
あるシステムを制御する際に、そのシステムが安定か不安定かを事前に確認することは、とても重要です。 システムが不安定の場 …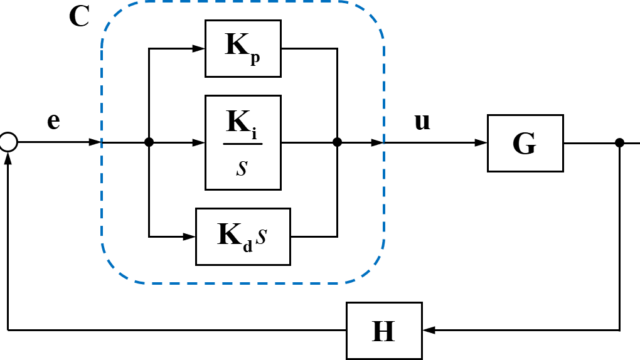 制御工学
制御工学PID制御のブロック線図と伝達関数を表す方法
2018-12-21 tajima Tajima Robotics
今回の記事では、 制御の世界で広く用いられているPID制御(PID Controller)について説明し、PID制御を用いたフィードバック制御をブロック線図(Block D …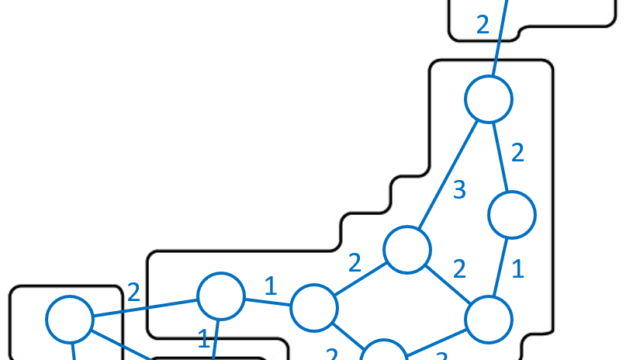 経路探索
経路探索グラフ理論と経路探索するアルゴリズムの紹介
2018-12-18 tajima Tajima Robotics
日常的にGoogleマップや乗り換えアプリなどで経路探索を行う方は多いと思います。 これらの技術によって、僕たちは最適な道順を選んだり、目的地に早く着けたりす …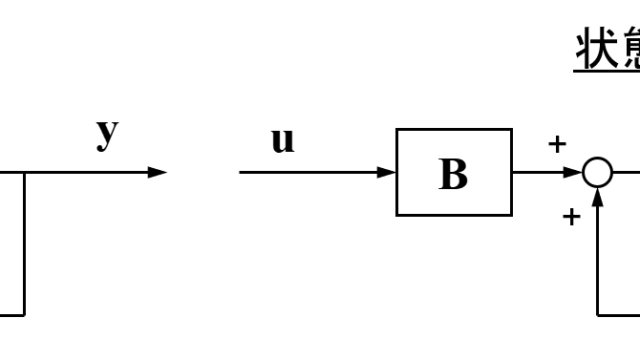 制御工学
制御工学状態フィードバックの状態方程式をブロック線図で表す
2018-12-13 tajima Tajima Robotics
システムの制御を行う際に、システムの状態をフィードバックして行う制御方があります。 以前の記事で紹介した台車型倒立振子 …



















 ELEGOO Arduinoスターターキット
ELEGOO Arduinoスターターキット

 UNO R3スマートロボットカー
UNO R3スマートロボットカー

 Raspberry Pi 3 Model b+
Raspberry Pi 3 Model b+
